
Hallo Zusammen,
in den letzten Tagen habe ich mal wieder mit den Stepper Motoren für die Märklin C-Gleis Weichenantriebe rumgespielt.
Dieses Mal habe ich die autarke DCC-Platine von Dominik und mir verwendet welche bis jetzt wenig Beachtung gefunden hat. 
Sie ist gerade mal 4.5mm dick und passt in jede Märklin C-Gleis Weiche
und ersetzt die von Märklin für viele Euros angebotene Platine.

Aber unsere Schaltung kann mehr:
Dabei kostet die Schaltung und der passende Schrittmotor viel weniger (< 12€ inclusive Platine und Antrieb) und man hat außerdem noch den Bastelspaß.
Der Motor wird in den 3D-gedruckten Halter von Dominik gesteckt und an den original Befestigungspunkten verschraubt. Aus einem stück Draht biegt man sich die Betätigungsstange.
Die Bohrungen der Platine passen exakt zu den Stiften der Weichen so dass sich auch die Platine ganz einfach eingebaut werden kann.
Und so sieht das Ganze dann in Aktion aus:
Mit der einen DCC-Adresse wird die Weiche geschaltet, mit der anderen das Licht.
Adressen:
Die Adressen können beliebig konfiguriert werden. So kann man das Licht an allen Weichen mit einer DCC-Adresse schalten. Das muss man aber nicht jedes Mal einschalten. Der Arduino speichert den letzten Zustand und stellt diesen wieder her, wenn die Versorgungsspannung wieder eingeschaltet wird.
Zustandsspeicherung:
Der Prozessor merkt sich auch die letzte Position der Weiche und startet den Schrittmotor nicht nochmal, wenn die gleiche Position erneut kommandiert wird. Falls mal während der Bewegung der Strom abgeschaltet wird, dann wird die Weiche beim nächsten Start in die gewünschte Position gefahren. Das ist wichtig, weil die Weiche ja vorbildgerecht 3 Sekunden zum stellen benötigt (Könnte in der Software zwischen 1 und x Sekunden stufenlos eingestellt werden).
Anschluss:
Versorgt wird die Elektronik über das Gleis. Die Platine wird einfach über zwei Kabel mit den Kontaktlaschen der C-Gleise verbunden.
=> Es ist keine zusätzliche Verkabelung nötig.
Konfiguration:
Die DCC-Adressen werden bei der Inbetriebnahme definiert und im EEPROM des Arduinos gespeichert.
Damit befindet sich der Arduino im Programmiermodus. Das wird durch die Blinkende LED (Weichenlaterne) angezeigt.
Achtung: Wenn der Stepper bereits in der richtigen Position steht bewegt er sich nicht. Am langsamen Blinken der LED erkennt man trotzdem, dass der Befehl akzeptiert wurde.
Damit ist die Programmierung der Adresse abgeschlossen.
Die LED blinkt nicht mehr.
Warum habe ich geschrieben, dass man die rote oder die grüne Taste gedrückt wird?
Welche der beiden Tasten betätigt wird ist tatsächlich nicht egal. Mit der roten Taste wird die normale Funktion geschaltet, mit Grün die inverse Funktion.
Doch was ist „Normal“? Ich würde sagen Rot = Gerade und Grün = Abbiegen. Aber das ist Geschmacksache und hängt außerdem vom Anschluss der Stepper Pins ab. Darum ist es das Beste, wenn man zunächst einfach die rote Taste drückt und dann schaut ob sie die Weiche wie gewünscht verhält. Wenn nicht, dann wiederholt man die Konfiguration noch mal mit der grünen Taste.
Wichtig ist, dass man nur eine der beiden Tasten betätigt, weil der zweite Tastendruck ja die Adresse der LED definiert.
Bei der LED gilt das gleiche. Zunächst betätigt man die rote Taste und prüft dann ob die LED wie gewünscht geschaltet wird. Auch hier gibt es die Möglichkeit die LED invers zu schalten indem man die grüne Taste bei der Konfiguration wählt.
Das ist z.B. dann sinnvoll wenn man die LED als Statusanzeige verwenden will. Dann vergibt man für die Weiche und die LED die gleiche DCC-Adresse. Wenn man hier beides mal die gleiche Logik verwenden will, dann müsste man die gleiche Taste zweimal drücken. Das ist aber programmtechnisch nicht so einfach, weil manche Zentralen einen DCC mehrfach wiederholen. In diesem Fall kann man die PROG Anschlüsse nach der Konfiguration der Weichenadresse noch mal kurz verbinden und dann den selben Taster nochmal drücken. Beim Schreiben fällt mir ein, das es ja einfacher gewesen währe wenn ich eine Wartezeit eingebaut hätte. Vielleicht gibt es das in einer neuen Software Version.
Nachbau:
Das Programm und die Daten für die Platine und den Stepper Halter findet Ihr auf GitHub:
dieser Schaltung mussten aus Platzgründen SMD Teile verwendet werden. Zum Glück sind es nicht so viele. Der Großteil der Bauteile sitzt auf dem A4988 Stepper Modul welches man fertig kauft.
Programm: https://github.com/Hardi-St/MobaLedLib_D...ny_Mini_Stepper
3D-Daten
Bei
Zunächst werden alle SMD-Bauteile (von Klein nach Groß) bestückt (Wenn genügend Interessenten zusammen kommen können wir Platinen bestellen bei denen alle SMD-Bauteile bestückt sind).
Anschließend wird der ATTiny programmiert (Siehe unten).
Dazu ist es sinnvoll, wenn bereits eine LED angeschlossen ist. Das kann auf zwei verschiedene Arten gemacht werden:
Nach dem Programmieren muss nur noch das Stepper Modul bestückt werden.
Dieses von dem Kunststoff Halter der Pins befreit und dann bündig auf die Platine gelötet.
Auf dem Bild sind die rechten Halter entfernt. Die linken müssen auch noch weg.
Damit die Pins unten nicht überstehen habe ich die Platine eingesetzt und dann die Pins mit einem Knipex Elektronik-Seitenschneider ganz knapp angeschnitten. Dann habe ich die Stepper Platine so weit rausgedrückt, dass nichts mehr von den Pins aus der Trägerplatine rausschaut. Anschließend wird das Teil mit ganz wenig Lötzinn festgelötet so dass nicht übersteht. Das ist mir bei den meisten Pins ganz gut gelungen:
Nur die beiden Lötjumper stehen über.
Wenn die Platine fertig bestückt ist muss der Strom für den Stepper eingestellt werden. Dazu misst man die Spannung zwischen dem Minus-Pol des Gleichrichters und dem Drehteil des Potis. Ich klemme dazu eine Krokodilklemme an den Schraubenzieher mit dem ich das Poti verstelle und stelle etwa 0.3V ein.
Danach werden die 4 Anschlüsse des Stepper Motors der Reihenfolge nach mit der Platine verbunden. Das geht am besten mit dünnen Decoder Litzen.

Die Lötkontakte des Steppers sind mit etwas Licht Kleber an den 3D-Halter geklebt:
Der Stepper ist nur eingeklipst. Je nach Drucker Einstellungen muss man ein bisschen nacharbeiten.
Hier noch mal von der anderen Seite:
Programmierung:
Zur Programmierung benötigt man die „400-Tiny-Uniprog“ Platine. 
Mit dem ATTiny85 Adapter. Hier der Adapter noch mal separat:
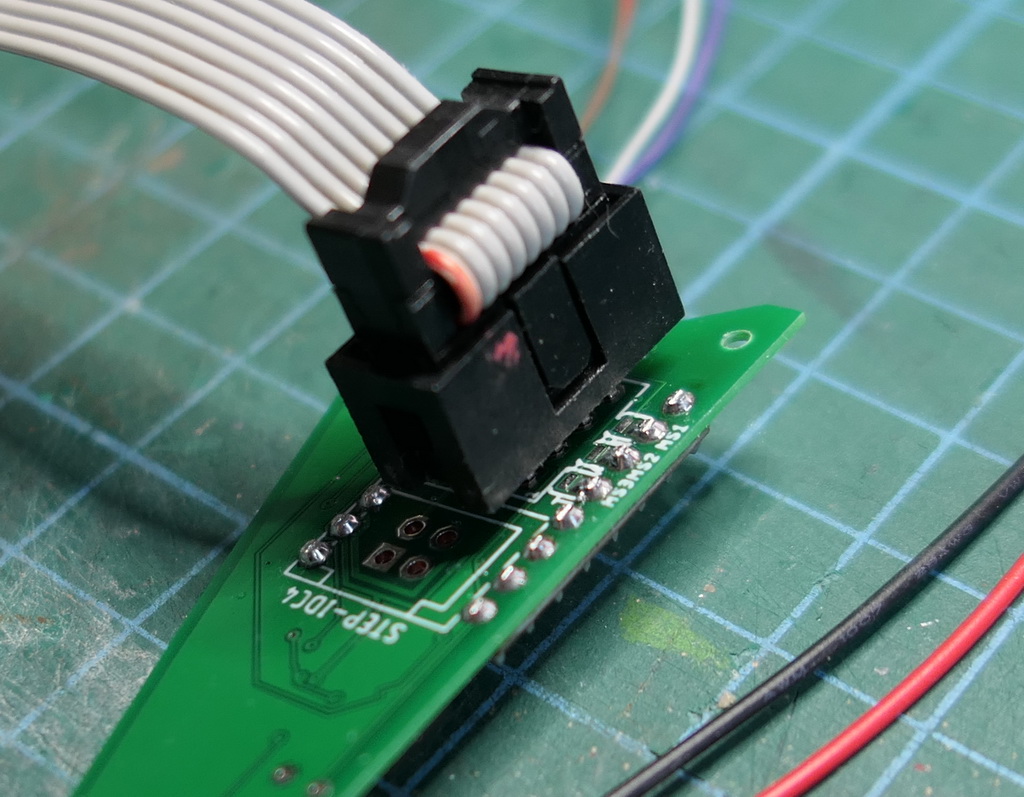
Am anderen Ende des Flachkabels sitzt ein präparierter Pfostenstecker bei dem die Pins ein wenig verbogen sind so dass sie auch ohne löten Kontakt zur Platine bekommen. Das ist leider nicht so ganz einfach. Am besten geht es, wenn die Stepper Platine noch nicht eingelötet ist und man den Stecker leicht schräg halten kann. In einer späteren Version der Platine werde ich die Löcher leicht versetzt anordnen. Dann gelingt das hoffentlich besser.
Während man das mit der einen Hand festhält startet man das Programm „Upload_Hex.cmd“ welches man zusammen mit der Datei „ATTiny_Mini_Stepper.hex“ herunter lädt.
Ich habe mir diesen Adapter mit federnden Pogo Pins gebastelt:
Beim Programmiren des ATTinys müssen die Kontakte sicher verbunden sein. Falls nicht, dann wird eine Fehlermeldung ausgegeben und man muss die Programmierung wiederholen. Hier ist eine ruhige Hand und Geduld gefragt ;-(
Schaltplan:
Hardi
Text created by Hardis Forum_Doc_Convert Programm
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #1 von
Hardi
, 22.03.2023 22:59
#1 von
Hardi
, 22.03.2023 22:59
Haltet Euch unbedingt von diesen Seiten fern:
viewtopic.php?f=7&t=165060
https://wiki.mobaledlib.de/
sonst wird Eure Anlage niemals fertig…
Unsere Anlage findet Ihr hier:
RE: Unsere Kinder und Vater Anlage(n)

RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #2 von
fbstr
, 23.03.2023 06:15
#2 von
fbstr
, 23.03.2023 06:15
Zitat von Hardi im Beitrag #1
...welche bis jetzt wenig Beachtung gefunden hat.
Das kann ich so nicht stehen lassen

Die Platine hat eine enorme Beachtung gefunden - von mir

Siehe auch hier:
💡🚂🚃🚃 ATTiny_Mini_Stepper Platine für MäTrix C-Weichen
Gruss
Frank
---------------------------------------------------------------------------------------------------------------------
MobaLedLib Wiki
Projekt "Bahnpark Augsburg"
Stummitreff BB: jeden 3. Freitag im Monat im Haus Sommerhof in Sindelfingen
- fbstr
- Metropolitan (MET)
-
Beiträge: 2.523 Registriert am: 28.08.2016 Ort: Stuttgart Gleise Peco Code 75, Trix C Spurweite H0, H0e Steuerung YD7001, MobaLedLib, MirZ21, Lenz LZV100 Stromart DC, Digital

RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #3 von
TRAXXer
, 23.03.2023 07:29
#3 von
TRAXXer
, 23.03.2023 07:29
Hallo zusammen,
Ich hatte schon an einigen Stellen von eurer Arbeit mit den kleinen Steppern gelesen, großartige Sache. Für mich ist dieser Antrieb (leider) nicht passend, da ich mir vor kurzem erst eine kleine Teppichbahn mit Roco Line zusammen gekauft habe. Preislich und von Aufwand her sieht das aber sehr wirtschaftlich aus.
Meine Frage wäre; wie ist es um die Versorgung mit den Motoren gestellt? Ich kenne mindestens ein Open Source Projekt, das sehr stark von einem bestimmten BLDC Motor abhing, welcher aber nur noch resteweise auf AliExpress verkauft wurde. Als er nirgendwo mehr verfügbar war und die Alternativen nicht passten, musste man aufwändig den ursprünglichen Hersteller kontaktieren und einen teuren Rerun auflegen lassen.
Wenn man so eine Entwicklung startet, wünscht man sich ja dass sie auch nachhaltig ist, d.h. eine Verfügbarkeit der benötigten Komponenten längerfristig gegeben ist. Weiß man, wo diese kleinen Stepper zum Einsatz kommen?
LG, Niklas
Schöne Grüße, Niklas

- TRAXXer
- EuroCity (EC)
-
Beiträge: 1.317 Registriert am: 19.01.2011 Spurweite H0 Stromart DC, Digital

RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #4 von
Hardi
, 23.03.2023 08:05
#4 von
Hardi
, 23.03.2023 08:05
Hallo Niklas,
ich habe keine Ahnung, woher die kleinen Dinger herkommen. Aber es gibt sie schon seit einiger Zeit.
Wie lange die Teile noch verfügbar sind, weiß man natürlich nicht. Aber es ist ja kein kommerzielles Projekt, bei dem man viel Geld in die Infrastruktur steckt, welches verloren wäre, wenn die Versorgung zusammen bricht.
Wenn man seine Anlage damit ausrüsten will, dann besorgt man sich einfach doppelt so viele Antriebe, wie man tatsächlich braucht.
Leider ist die Qualität der Motörchen auch nicht so hoch. Bei meinem Schattenbahnhof, mit 12 Weichen antrieben, hatte ich tatsächlich eine Ausschussrate von 52 %. Es gab die unterschiedlichsten, vermutlich Transport oder Lager bedingten defekte.
- Verbogene Gehäuse
- Abgebrochene Kontakte / Zum Teil erst bei der Montage
- Schwergängige / Blockierende Antriebe
Bei der neuen Charge waren bis jetzt keine Motoren kaputt. Aber ich habe auch erst 3 verbaut.
Jürgen (@Jueff) hat für seine K-Gleis? Weichen einen Antrieb entwickelt, welcher einen anderen Stepper verwendet. Leider finde ich gerade keine Bilder.
=> Man könnte den Antrieb vielleicht auch mit diesem Motor realisieren. Durch den 3D-Drucker kann man ja schnell einen anderen Halter drucken.
==> Dieses Konzept lässt sich auch auf andere Gleissysteme anwenden.
Hardi
Hardi
Haltet Euch unbedingt von diesen Seiten fern:
viewtopic.php?f=7&t=165060
https://wiki.mobaledlib.de/
sonst wird Eure Anlage niemals fertig…
Unsere Anlage findet Ihr hier:
RE: Unsere Kinder und Vater Anlage(n)
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #5 von
apras
, 23.03.2023 10:09
#5 von
apras
, 23.03.2023 10:09
Hallo Hardi
Tolles Projekt. Ich habe gerade vier von solche Steppermotoren gekauft, aber bin etwas beunruhigt wegen die hohe Ausfallrate den du siehst. Hoffentlich gehen die Motoren nicht spontan, während des Betriebs, kaputt. Ich möchte probieren ob ich diese Motoren als Ersatz für die Antriebe von Viessmann Signale einsetzen kann. Wenn die Ausfallrate aber zu hoch ist, kann man alternativ da auch 1,5Gram Microservos einsetzen; es gibt davon schon mehrere Anleitungen im Netz.
Wegen die Schaltung habe ich eine kleine Frage / Bemerkung. Ich sehe das dass DCC Signal über R9 (22K) PB2 (INT0) erreicht. Aber besteht da nicht der Gefahr das dass Eingangssignal bei PB2 zu hoch wird? Währe es nicht besser noch ein 4,7V Zenerdiode als Schutz zu montieren?
Grüße
Aiko
Grenzbahnhof Gibtsnicht: Alte Fotos vom Schattenbahnhof
Loklift im Eigenbau
- apras
- InterRegio (IR)
-
Beiträge: 206 Registriert am: 17.11.2016 Ort: Enschede, Niederlande Gleise Rocoline, Weinert Mein Gleis Spurweite H0 Steuerung Traincontroller, Lenz Stromart DC, Digital
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #6 von
Hardi
, 23.03.2023 10:28
#6 von
Hardi
, 23.03.2023 10:28
Hallo Aiko,
ich hoffe, dass keine weiteren Ausfälle im Betrieb auftreten. Darüber kann ich aber noch keine Aussage machen, da mein Schattenbahnhof erst seit ein paar Wochen fertig ist. Generell sieht der Motor, in meinen Augen, sehr solide aus. Er ist ja komplett aus Metall gefertigt und hat eigentlich keine Verschleißteile (Kohlen). Es könnte natürlich sein, dass das Fett irgendwann alt wird, aber das dauert vermutlich ne ganze Weile.
Ich will meine Signale auch mit diesen Steppern antreiben. Hier hoffe ich, dass ich ein realistischer Nachwippen implementieren kann. Bei einem Servo ist es sehr viel schwieriger feine Bewegungen mit unterschiedlicher Geschwindigkeit zu bauen als bei einem Schrittmotor.
Dominik hat auch schon einen sehr schönen Halter für die Antriebe entwickelt:
#1255: 💡 MobaLedLib: 768 LEDs, Servos, Sound, ……………❗ Nächster Stammtisch Mi. 12.4.23 20 Uhr ❗ (48)
Hier mein erster Beitrag dazu. Sehr schön, noch mit Holzhalter: #1191: 💡 MobaLedLib: 768 LEDs, Servos, Sound, ……………❗ Nächster Stammtisch Mi. 12.4.23 20 Uhr ❗ (48)
Eine Z-Diode ist nicht nötig, da die Schutzdioden im ATTiny die Spannung ableiten. Bei sehr großen Überspannungen wird die vermutlich die Grätsche machen. Aber dann sind auch die anderen (Lok)decoder hin. Wenn man der internen Diode nicht traut, dann könnte man eine zusätzliche Schottky Diode zum Ableiten der Spannung verwenden (Billiger).
Hardi
Haltet Euch unbedingt von diesen Seiten fern:
viewtopic.php?f=7&t=165060
https://wiki.mobaledlib.de/
sonst wird Eure Anlage niemals fertig…
Unsere Anlage findet Ihr hier:
RE: Unsere Kinder und Vater Anlage(n)
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung ��
![]() #7 von
fbstr
, 23.03.2023 12:00
#7 von
fbstr
, 23.03.2023 12:00
Bezüglich Ausfall: Ich habe 13 Antriebe im Einsatz, hauptsächlich bei den monatlichen Stummi-BB-Treffen.
In dieser Zeit ist keiner der Stepper ausgefallen!
Wenn einer nicht richtig funktioniert, dann war das gleich von Anfang an zu erkennen. Ich denke ich hatte ca. 1 von 10 der nicht funktionierte, aber eben gleich von Anfang an.
Gruss
Frank
---------------------------------------------------------------------------------------------------------------------
MobaLedLib Wiki
Projekt "Bahnpark Augsburg"
Stummitreff BB: jeden 3. Freitag im Monat im Haus Sommerhof in Sindelfingen
- fbstr
- Metropolitan (MET)
-
Beiträge: 2.523 Registriert am: 28.08.2016 Ort: Stuttgart Gleise Peco Code 75, Trix C Spurweite H0, H0e Steuerung YD7001, MobaLedLib, MirZ21, Lenz LZV100 Stromart DC, Digital
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung ��
![]() #8 von
Eckhart
, 25.03.2023 15:36
#8 von
Eckhart
, 25.03.2023 15:36
Hallo Hardi!
Zitat von Hardi im Beitrag #6
Ich will meine Signale auch mit diesen Steppern antreiben. Hier hoffe ich, dass ich ein realistischer Nachwippen implementieren kann. Bei einem Servo ist es sehr viel schwieriger feine Bewegungen mit unterschiedlicher Geschwindigkeit zu bauen als bei einem Schrittmotor.
Ich kann mir, ehrlich gesagt, nicht wirklich vorstellen, dass man mit Schrittmotoren einen Vorteil hätte?
Viel mehr ist imho der algorithmische Ansatz entscheidend für die Qualität des Nachschwingens! Was schon mal gar nicht funktioniert ist, ein Nachschwingen mit nur einem Parameter zu beschreiben! Dieses "schwach - mittel - stark", was viele kommerzielle Decoder nur einstellen können, ist einfach zu kurz gesprungen!
Meiner Meinung nach braucht man mindestens drei Parameter und die auch noch differenziert pro Endlage. Man benötigt die Amplitude (das "Anschwingen" beim Erreichen der Endlage), eine Frequenz und die Zeitdauer des Ausschwingens (bzw. die Dämpfung mit der die Schwingung irgendwann aufhört). Bei einem zweiflügeligen Formsignal, welches für drei Begriffe zwei Servos oder Schrittmotoren braucht, ist man schon bei 12 Parametern!
Es ist eben ein riesiger Unterschied, ob man ein Formsignal, oder eine Schranke, oder ein Schuppentor nachschwingen lässt! (Anfangs)Amplitude, Frequenz und Dämpfung sind jeweils hoch unterschiedlich!
Gruß, Eckhart
PS: Mit der derzeitigen Servoplatine der MobaLedLib ist das leider gar nicht richtig möglich, da der analoge Output der WS2811 Chips und die erneute Quantisierung im Atmel leider alles zunichte macht. Man würde eine rein digitale Lösung benötigen, wie sie Jürgen ja schon mit dem ESP32 als digitaler WS2811 Receiver umrissen hat.
Meine aktuelle Umfrage: Wie gut kannst du mit dem MLL Pattern-Configurator umgehen?
- Eckhart
- InterCity (IC)
-
Beiträge: 592 Registriert am: 28.01.2022 Gleise K-Gleis Spurweite H0 Steuerung CS3+ Stromart AC, Digital

RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #9 von
Jueff
, 25.03.2023 20:47
#9 von
Jueff
, 25.03.2023 20:47
Zitat von Hardi im Beitrag #4
Hallo Niklas,
...Jürgen (@Jueff) hat für seine K-Gleis? Weichen einen Antrieb entwickelt, welcher einen anderen Stepper verwendet. Leider finde ich gerade keine Bilder.
Hardi
Hardi
Hallo Zusammen,
siehe hier: Langsamer Unterflur Weichenantrieb für Roco Line Weichen mit Schrittmotor
Grüße,
Jürgen...
Alle Infos zur MobaLedLib findet ihr hier: https://wiki.mobaledlib.de/

RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #10 von
Hardi
, 25.03.2023 21:41
#10 von
Hardi
, 25.03.2023 21:41
Hallo Eckhard,
das Nachwippen sieht sehr gut aus.
Ich sehe ein Problem darin, dass man nur alle 20 ms einen neuen PWM Wert an das Servo schicken kann. Aber es geht anscheinend doch.
Meine Idee ist, dass man die Bewegung über den Pattern_Configurator definieren kann. Dann hätte man fast beliebig viele Parameter. Das ganze soll dann auf einem ATTiny so laufen. Dieser bekommt die Pattern daten geschickt und arbeitet sie autark ab. Beim Charlieplexing Modul habe ich das ja auch so gemacht. Aber ob ich jemals dazu kommen werden.
Hardi
Haltet Euch unbedingt von diesen Seiten fern:
viewtopic.php?f=7&t=165060
https://wiki.mobaledlib.de/
sonst wird Eure Anlage niemals fertig…
Unsere Anlage findet Ihr hier:
RE: Unsere Kinder und Vater Anlage(n)
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #11 von
andreakarina
, 10.09.2023 16:41
#11 von
andreakarina
, 10.09.2023 16:41
Hallo.
Möchte den Attiny mit der Multi Maus programmieren.Diese funktioniert nicht.Hat jemand Erfahrung warum diese nicht funktioniert.
- andreakarina
- RegionalExpress (RE)
-
Beiträge: 63 Registriert am: 29.03.2015 Spurweite H0
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #12 von
Hardi
, 10.09.2023 19:55
#12 von
Hardi
, 10.09.2023 19:55
Hallo Michael,
das liegt vermutlich an dem Adressoffset. Addiere mal +/- 4 zur Adresse.
Hardi
Haltet Euch unbedingt von diesen Seiten fern:
viewtopic.php?f=7&t=165060
https://wiki.mobaledlib.de/
sonst wird Eure Anlage niemals fertig…
Unsere Anlage findet Ihr hier:
RE: Unsere Kinder und Vater Anlage(n)
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #13 von
Railwolf
, 11.09.2023 08:19
#13 von
Railwolf
, 11.09.2023 08:19
Hallo Hardi,
bedingt durch meine längere Forenabsenz habe ich diesen Thread erst heute entdeckt.
Hab angefangen zu lesen. Große Augen gemacht. WOW!
Und dann: SMD löten? Na gut, vielleicht kommt eine Bestellung für bestückte Platinen zusammen.
Bei den nachfolgenden Ausführungen bin ich dann ausgestiegen. Das ist mir zu hoch, dafür hab ich keine Hirnkapazitäten frei - ich bin für einiges zu alt (auch SMD-Löten), aber noch zu jung, um auf meinen Beruf verzichten zu können, und der fordert mich geistig ziemlich und unwägbar (Arbeit mit Menschen - da bist du vor keiner Überraschung sicher).
Schade.
Dann macht es bei mir wohl weiter "Klack", oder auch "Klack-klack-klack-klack". Comme d'habitude...
Mit vielen Grüßen
Wolf 🐺
- Railwolf
- Metropolitan (MET)
-
Beiträge: 2.629 Registriert am: 08.07.2019 Gleise alle Arten von Skipiste Spurweite H0 Steuerung tams RedBox Stromart AC, Digital

RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #14 von
Hardi
, 11.09.2023 08:44
#14 von
Hardi
, 11.09.2023 08:44
Hallo Wolf 🐺,
SMD löten ist gar nicht so schwierig. Mit einer Lupe und feinem Lötzinn geht das vielleicht sogar einfacher als das Löten "normaler" Bauteile.
Ja, die Abstände der Pins des ATTinys sind schon kleiner, aber es macht nichts, wenn man versehentlich zwei Pins verbindet. Mit etwas Entlötlitze bekommt man das wieder weg, ohne dass die Verbindung der Pins verloren geht.
=> Probiere es einfach mal. Je schwieriger die Aufgabe, umso größer das Erfolgserlebnis.
Tatsächlich ist das Anlöten der Drähtchen an den Schrittmotor das Schwierigste an der Geschichte.
Hardi
Haltet Euch unbedingt von diesen Seiten fern:
viewtopic.php?f=7&t=165060
https://wiki.mobaledlib.de/
sonst wird Eure Anlage niemals fertig…
Unsere Anlage findet Ihr hier:
RE: Unsere Kinder und Vater Anlage(n)
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #15 von
Railwolf
, 11.09.2023 10:14
#15 von
Railwolf
, 11.09.2023 10:14
Hallo Hardi,
Zitat von Hardi im Beitrag #14
Mit einer Lupe und feinem Lötzinn
da liegt das Problem. Ich hab ein Paar Lupen auf der Nase, allein schon für den Alltag. Eine zweite steht bei Bastelarbeiten auf dem Tisch, mit Ständer. Da müßte jetzt eine konkave Linse dazu, und die dritte Lupe - und dann geht das Ganze schon als Mikroskop durch.
Nee, ich kenne meine Grenzen.
Zitat von Hardi im Beitrag #14
Tatsächlich ist das Anlöten der Drähtchen an den Schrittmotor das Schwierigste an der Geschichte.
Das wiederum gehört zu den Dingen, die ich mir zutrauen würde - ruhige Hände hab ich. Solange mich keiner geärgert hat.
Mit vielen Grüßen
Wolf 🐺
- Railwolf
- Metropolitan (MET)
-
Beiträge: 2.629 Registriert am: 08.07.2019 Gleise alle Arten von Skipiste Spurweite H0 Steuerung tams RedBox Stromart AC, Digital
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #16 von
apras
, 11.09.2023 13:55
#16 von
apras
, 11.09.2023 13:55
Hallo Wolf
Ich habe das gleiche „Problem“ und auch ich möchte lieber keine SMDs mehr löten. Brauche ich auch nicht mehr, denn heutzutage wird dies für mich gemacht  .
.
Die elektronische Schaltungen zeichne ich zwar noch selber, aber danach lasse ich die Platine von einen Dienstleister (JLCPCB) assemblieren. Mann möchte meinen dass so etwas schwierig und teuer ist, aber weit gefehlt. Weil die elektronische Komponenten beim Dienstleister sehr billig sind, und Bestückung ungefähr 7 Euro kostet, ist man oft billiger aus als wenn man alles selber löten wurde.
Im Moment bin ich gerade daran eine Platine für Formsignale (und diese Micro Schrittmotoren) zu bauen. Die A4988 kommt dann gleich mit auf die Platine. Nur die 4 Anschlüsse zum Schrittmotor muss ich noch selber löten.
Versuch es auch mal 
Grüße, Aiko
Grenzbahnhof Gibtsnicht: Alte Fotos vom Schattenbahnhof
Loklift im Eigenbau
- apras
- InterRegio (IR)
-
Beiträge: 206 Registriert am: 17.11.2016 Ort: Enschede, Niederlande Gleise Rocoline, Weinert Mein Gleis Spurweite H0 Steuerung Traincontroller, Lenz Stromart DC, Digital
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #17 von
Hardi
, 11.09.2023 19:10
#17 von
Hardi
, 11.09.2023 19:10
Hallo Aiko,
das war ein ganz schlechter Beitrag. Da könnte ja jemand auf die Idee kommen, Dich zu bitten, die Daten zum Bestücken der Platine zusammenzustellen und dann mal ein paar Platinen zu bestellen. Im Grunde ist das tatsächlich ganz einfach. Man muss nur zwei Dateien erstellen, welche Die Bauteile beschreibt und deren Platzierung.
Vielen Dank, dass Du Dich freiwillig dazu melden willst.
Wenn der erste Prototyp richtig bestückt ist und funktioniert, dann wird Frank (@Frank_TT) die Platine sicherlich in sein Sortiment aufnehmen.
@Alle: Schreibt doch mal, wie viele bestückte Platinen Ihr braucht.
Hardi
Haltet Euch unbedingt von diesen Seiten fern:
viewtopic.php?f=7&t=165060
https://wiki.mobaledlib.de/
sonst wird Eure Anlage niemals fertig…
Unsere Anlage findet Ihr hier:
RE: Unsere Kinder und Vater Anlage(n)
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #18 von
apras
, 11.09.2023 22:04
#18 von
apras
, 11.09.2023 22:04
Hallo Hardi
Darf man machen.eine Warnung im Voraus. Bei mir sind die Platinen zweimal zu teuer als wenn man die gleich bei JLCPCB bestellt 
Aber im Ernst: wenn jemandem mich braucht für Platinen Entwurf, zb. für Den MobaLedLib, dann kann ich vielleicht etwas dazu Beitragen. Vielleicht wäre es eine Option Platinen (und Komponenten) auch via Platformen wie OSHWLabs verfügbar zu Stellen.
Groeten uit Nerderland , Aiko
Grenzbahnhof Gibtsnicht: Alte Fotos vom Schattenbahnhof
Loklift im Eigenbau
- apras
- InterRegio (IR)
-
Beiträge: 206 Registriert am: 17.11.2016 Ort: Enschede, Niederlande Gleise Rocoline, Weinert Mein Gleis Spurweite H0 Steuerung Traincontroller, Lenz Stromart DC, Digital
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #19 von
MJBB
, 08.03.2024 00:20
#19 von
MJBB
, 08.03.2024 00:20
Hallo Hardi,
das ist wirklich ein großartiges Projekt. Ich habe mir einmal Platinen zum Testen bestellt und möchte mir die passenden Elektronikbauteile bei Reichelt zusammenbestellen. Woran ich allerdings unerwarteterweise scheitere ist der Wannenstecker. Hast Du einen Tipp, wo man diesen in guter Qualität bekommt? Und wo hast Du Dir die Pogopins gekauft? :D
Viele Grüße,
Merlin
- MJBB
- RegionalExpress (RE)
-
Beiträge: 73 Registriert am: 05.01.2006
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #20 von
fbstr
, 08.03.2024 11:22
#20 von
fbstr
, 08.03.2024 11:22
Zitat von MJBB im Beitrag #19
... Woran ich allerdings unerwarteterweise scheitere ist der Wannenstecker. Hast Du einen Tipp, wo man diesen in guter Qualität bekommt? Und wo hast Du Dir die Pogopins gekauft? :D
Hallo Merlin,
die Wannenstecker und -buchsen bekommst Du bestimmt bei @Frank_TT im MobaLedLib-Shop (da mußt Du Dich registrieren - aber das lohnt sich...). Ansonsten auch bei Pollin.
Solche Pogosticks bekommt man bei Ali in China. Sind aber für das Programmieren nicht notwendig!
Meinen Fred hast Du ja schon entdeckt. Ich mache das einfach so:
Dominik hat die Bohrungen leicht versetzt, so dass der Wannenstecker eine ganz gute Kontaktsicherheit bietet.
Gruss
Frank
---------------------------------------------------------------------------------------------------------------------
MobaLedLib Wiki
Projekt "Bahnpark Augsburg"
Stummitreff BB: jeden 3. Freitag im Monat im Haus Sommerhof in Sindelfingen
- fbstr
- Metropolitan (MET)
-
Beiträge: 2.523 Registriert am: 28.08.2016 Ort: Stuttgart Gleise Peco Code 75, Trix C Spurweite H0, H0e Steuerung YD7001, MobaLedLib, MirZ21, Lenz LZV100 Stromart DC, Digital
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #21 von
andreakarina
, 08.03.2024 12:50
#21 von
andreakarina
, 08.03.2024 12:50
Hallo.
Habe Stecker auf Lager.
Kannst dich gerne melden
Auch bei weiteren Fragen
Mfg
- andreakarina
- RegionalExpress (RE)
-
Beiträge: 63 Registriert am: 29.03.2015 Spurweite H0
RE: ⏳ Langsamer Weichenantrieb für C-Gleis mit Schrittmotor und DCC Steuerung 💡
![]() #22 von
MJBB
, 23.03.2024 19:37
#22 von
MJBB
, 23.03.2024 19:37
Vielen Dank für eure Hilfe! Ich konnte nun eine Quelle für die Wannenstecker auftreiben. Nach dem mühsamen, aber auch lehrreichen Löten von 5 Platinen habe ich beschlossen nachzugucken, wie viel die Produktion inkl. Bestückung kosten würde. Man liegt bei einer Abnahme von 20 Stück bei 5-6 Euro bei JLCPCB. Da lohnt das Löten absolut nicht. :D Die entsprechenden Bestückungslisten kann ich auch gerne teilen. Allerdings Vorsicht, ggf. muss man die Positionierung der Bauteile bei JLCPCB noch im Browser anpassen.
Bevor ich das ganze teste und dort bestelle, wollte ich noch einmal fragen, ob C3 und C4 als Tantal-Kondensatoren ausgeführt Vorteile haben. Und C4 liegt mit dem Pluspol Richtung Platinenrand, korrekt?
Viele Grüße,
Merlin
- MJBB
- RegionalExpress (RE)
-
Beiträge: 73 Registriert am: 05.01.2006
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Steuerung des Schattenbahnhofs
Erstellt im Forum Anfängerfragen von chris-s - 6
- 886
- Letzter Beitrag von
Railwolf

05.11.2023
- Steuerung des Schattenbahnhofs
-
- Kopfschattenbahnhof - Steuerung mit CS3
Erstellt im Forum Anfängerfragen von Oberwiesel - 7
- 1377
- Letzter Beitrag von
dawa789
02.05.2023
- Kopfschattenbahnhof - Steuerung mit CS3
-
- Märklin K-Gleis Weichenantrieb 7549 reparieren
Erstellt im Forum Spur H0 von - 6
- 4860
- Letzter Beitrag von
hu.ms
28.01.2020
- Märklin K-Gleis Weichenantrieb 7549 reparieren
-
- Märklin Weichenantrieb + Dessen digitale Steuerung
Erstellt im Forum Anfängerfragen von - 8
- 2060
- Letzter Beitrag von
ICE Hannover
30.03.2019
- Märklin Weichenantrieb + Dessen digitale Steuerung
-
- Neubau Märklin H0 K-Gleis 5.00x2.50
Erstellt im Forum Anlagenplanung von - 56
- 13952
- Letzter Beitrag von
Weiler
05.11.2018
- Neubau Märklin H0 K-Gleis 5.00x2.50
-
- Langsamer Weichenantrieb fürs C-Gleis - meine Experimente
Erstellt im Forum Umbauten / Eigenbauten von - 9
- 7960
- Letzter Beitrag von
Mobahner
23.09.2012
- Langsamer Weichenantrieb fürs C-Gleis - meine Experimente
-
- K-gleis
Erstellt im Forum Anlagenbau von - 16
- 5926
- Letzter Beitrag von
CR1970
23.12.2009
- K-gleis
-
- Märklin Weichenantriebe und Lauer Steuerung
Erstellt im Forum Elektrik und Elektronik von - 10
- 3090
- Letzter Beitrag von
hans-gander
30.11.2008
- Märklin Weichenantriebe und Lauer Steuerung
-
- C-Gleis elektrischen Weichenantrieb anschließen
Erstellt im Forum Anfängerfragen von - 6
- 3542
- Letzter Beitrag von
Br 92
16.07.2008
- C-Gleis elektrischen Weichenantrieb anschließen
