

Schon länger beschäftigt mich der Gedanke, einen Zuglift zu bauen. Ich möchte diesen Thread benutzen, um meine Überlegungen zu schildern, Wissenslücken zu schließen und schlussendlich eine systematische Bauanleitung für alle interessierten Leser zu erstellen (Techniken, Material, Aufbauschritte). Vom Baufortschritt werde ich entsprechend berichten.
Hier zum Einstieg die erforderlichen Grundinfos und Links:
<wird ständig aktualisiert>
Anforderungen
- Geeignet für Spurweite N (Zuglänge von 2m)
- Je Ebene 2 Gleise
- 16 Ebenen, Ebenenhöhe 5cm (minus 1cm Plattendicke minus Schienenhöhe = effektive Nutzhöhe)
- Automatisches Anfahren von Ebenen
- Justierung, auch nachträglich, der Ebenenhöhe
- Ein- oder zweiseitige Anbindung
- Ebenenwahl über IR-Fernbedienung
- Ebenenanzeige (z.B. blinkend, wenn anzufahren, stetig, wenn erreicht), Fehleranzeige
- Steuerung über externe Befehle möglich (z.B. via UDP), aber auch über DCC-Befehle (z.B. Pseudolokadresse und Fahrstufe oder Funktionstaste)
Realisierungsstichworte
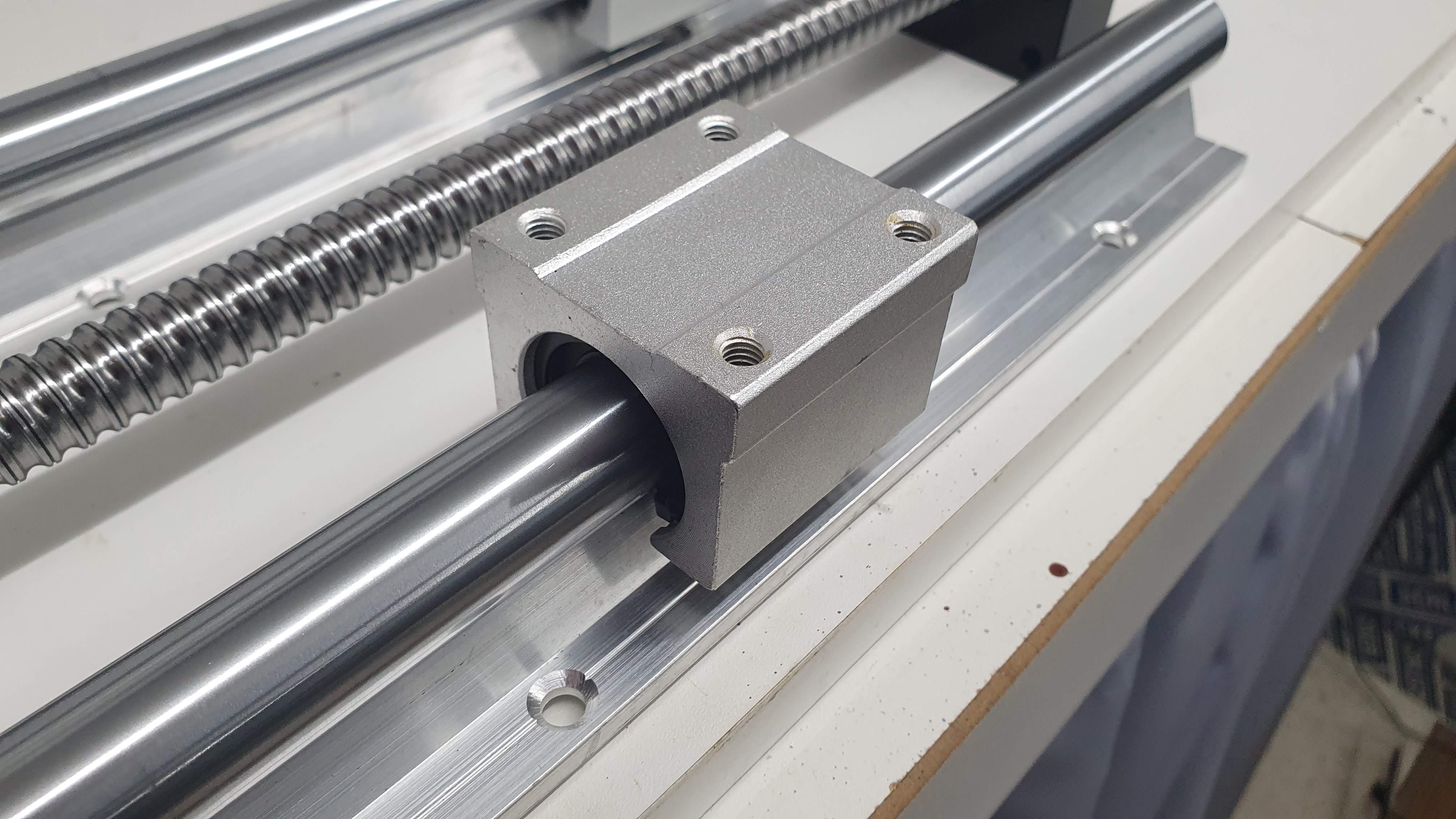
- Linearschienen SBR20, und Kugelumlaufspindel SFU2005
- Schrittmotor NEMA23 3Nm
- Schrittmotortreiber DM556T
- Microcontroller ESP32 mit WLAN-Konnektivität, Konfigurierbar über Browser. Eigene Software (PlatformIO/C++), wird frei zur Verfügung gestellt (zu klären: 3.3V des ESP32 auf 5V TTL des DM556T bringen, z.B. mit Level Shifter)
- Vitrinenteil Sperrholz mit Acrylglas-Scheibe
- 3D-Druck für wiederholgenaue Passteile wie z.B. Schienenführung am Gleisende
- Alle Gleise sind nur in Ausfahrstellung mit Fahrstrom und DCC-Signal (oder analog) versorgt
Realisierungsstufen
- FrankyMag Mini (1000mm Zuglänge, zweigleisig, 13 Ebenen, einseitig befahrbar)
- FrankyMag Maxi (2000mm Zuglänge, zweigleisig, 16 Ebenen, zweiseitig befahrbar)
Referenzen auf ähnliche Bauprojekte (ich bitte um Ergänzungshinweise)
- Zuglift von huebedi im Thread RE: Die Mark Michingen in N - Bauberichte, Deeplink folgt
- Zuglift von merlin1764 in https://www.1zu160.net/scripte/forum/for....php?id=1187097
- Zuglift 10x3 von apras im Thread Loklift im Eigenbau (Vitrine fest, Zug wird bewegt)
- Zuglift von roemerdesign mit Schrittmotor und waagerechter Motorwelle sowie Zahnriemen: RE: Die Luftbahn mit Schattenbahnhof am Zuglift...
- Zuglift (käuflich erwerbbar) H0 mit 7x2 (3) Gleisen: RE: Jägersburg – C-/K-Gleisanlage auf 6,75 x 4,20 mtr. - Baubericht (2)
Mit FrankyMag Mini möchte ich Erfahrungen sammeln (Machbarkeit, Genauigkeit, Belastbarkeit) und konzentriere mich erst einmal ausschließlich darauf.







 .
. 
 . Indes befürchte ich, die Sendung ist verloren gegangen und habe den Verkäufer um Mithilfe gebeten, damit ich endlich in den Genuss der Teile komme ...
. Indes befürchte ich, die Sendung ist verloren gegangen und habe den Verkäufer um Mithilfe gebeten, damit ich endlich in den Genuss der Teile komme ...







 Ab sofort könnt Ihr
Ab sofort könnt Ihr 


 , um den Mist runterzubekommen und mich nach Alternativen umsehen. Jede neue Kupplung wird also zu prüfen sein, am besten mit einem Lichtspalttest (Klotz seitlich heranrücken und sehen, ob der Lichtspalt sich ändert).
, um den Mist runterzubekommen und mich nach Alternativen umsehen. Jede neue Kupplung wird also zu prüfen sein, am besten mit einem Lichtspalttest (Klotz seitlich heranrücken und sehen, ob der Lichtspalt sich ändert).


 auf.
auf. ).
).