Hallo,
@Stephan:
Keine Ursache, gern geschehen. Freut mich, wenn es dich weiter bringt.
Zitat
Mit dieser "Offenbarung" kann man doch jetzt eigentlich sagen, dass sich die Antriebe mit Glockenankermotoren, zumindest für den digitalen Betrieb, nicht eignen, oder?
Naja, so ganz pauschal würde ich das nicht sagen. Ich glaube Hermann hatte dazu schon einmal eine, wie ich finde, treffende Antwort gefunden.
Für den Analogbetrieb sind sie auf jeden Fall eine gute Sache, wobei die Verwendung von Schwungmassen durch Profis vorgenommen werden sollte (mit entsprechedem Messequipment und Werkzeug). Alternativ gibt es auch auch eine el. Lösung mit Kondensator.
Für den Digitalbetrieb, kommt es darauf an, wie die Motoren eben angesteuert und geregelt werden. Da die wenigsten Modelle mit derartigen Motoren ausgestattet sind, liegt der Fokus bei der Regelung nicht auf einer möglichst guten Ansteuerung für diese Motoren. Außerdem wird die Hardware auf den Dekodern dadurch auch teurer, was dann die breite Masse mittragen müsste.
Schau meinen Decoder an: Der Preis beiinhaltet nur die Unkosten bei der Entwicklung und die Matreialkosten der Fertigung. Käme da noch eine übliche Gewinnmarge drauf, wären sie praktisch unverkäuflich.
Ach ja, und Digitalbetrieb ist nicht gleich Digitalbetrieb, wie du vielleicht weißt ist der bei C-Digital ganz anders und es ist auch digital! Das steht leider auch falsch in den einschlägigen "Fachzeitschriften" und "Fachbüchern", in denen behauptet wird, dass bei Digital immer eine TTL-Wechselspannug am Gleis liegt.
Zitat
Aber ich werde mich wohl an den Rat von Klaus halten und Zimo und D&H Dekoder nehmen, von denen habe ich ja schon einige.
Das halte ich für eine gute Idee. Du weißt ja nun worauf es bei diesen Motoren ankommt und vielleicht hilft es ja, den Herstellern etwas "Druck" zu machen. 
Wenn ein Mitarbeiter des techn. Supports Zweifel an deinen Aussagen hat, kannst du ihn gerne hier her verweisen. Ich habe kein Problem für meine Aussagen Rede und Antwort zu stehen.
Zitat
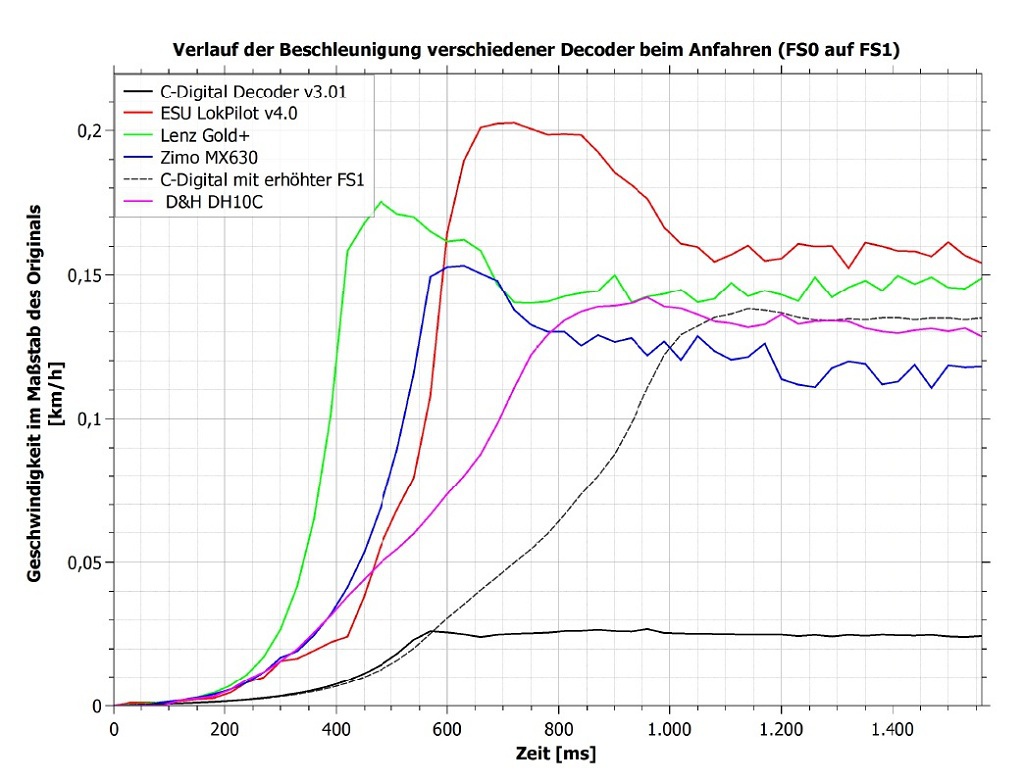
Auf jeden Fall erklärt deine Erklärung jetzt warum diese Messung von Hermann so ausgefallen ist.
Da muss ich dich etwas bremsen. Leider ist nicht ganz klar, wie Hermann die Decoder eingestellt hat (auch wenn ich seinem Verständniss für Motorregelungen vertraue). Es kann gut sein, dass man so manchen Decoder noch besser hätte einstellen können, zumal Hermann auch auf das Geräusch der Regelung geachtet hat. Demanch wird er z.B. den ESU wohl kaum mit 250Hz Regelungsfrequenz betrieben habe. Für den meinigen kann ich sagen, dass es in der von ihm verwendeten Decoderversion mit 99% sicherheit nicht besser geht.
Zitat
Martin hat doch bei seinen Dekodern PWM-Frequenzen bis 82kHz. Warum dann eigentlich?
Ganz einfach, weil die Probleme mit der Messpausenlänge und Abtastferquenz bei meinem Decoder schon geklärt sind und es dann sehr wohl einen Unterschied macht, ob in der Phase der hochfrequenten PWM der Motor mit einer Frequenz angesteuert wird, die für ihn nahezu wie eine Gleichspannung wirkt. (siehe Wirkungsgradbeispiel Faulhaber)
Klaus hat natürlich recht, beim ESU Decoder macht es praktisch keinen signifikanten Unterschied, ob in der Motor-PWM-Phase eine mit 20, 40, oder 60kHz anliegt. Die müssten ersteinmal an anderen Baustellen arbeiten.
Zitat
Wenn ich dich richtig verstanden habe spielt eigentlich die Abtastrate und Messpausenlänge eine viel wichtigere Rolle für den Motor als die MotorPWM selbst.
Das stimmt, aber eben nur solange, solang die Messpausenlänge und Abtastfrequenz in grobem Maße nicht zum Motor passen bzw. nicht zueinander passen.
@Klaus:
Nichts zu Danken. Ich habe mir gedacht, nimm lieber die Datenblätter zur Hand, nicht das wieder eine Diskussion über den Wahrheitsgehalt vom Zaun gebrochen wird, wie damals bei Hermann...
Zu deiner anschaulichen Beispiel-Rechnung: 2ms Messpause bei 250Hz Abtastfrequenz ist schon etwas übertrieben.
Deine Aussage ist natürlich dennoch richtig, nur das Beipiel etwas extrem. 1ms bei 150 bis 200Hz hätten schon genügt.
Ändert aber eigntlich auch nichts 
Eigentlich sollten wir das Thema nicht hier besprechen, wo es doch eigentlich über das C-Digitalsystem gehen soll. 


 :
: 



 , aber von meinem Vater weiß ich, dass sie mit Conrad Digital und den Loks mit Panto-Funktion 2001 auf der Messe in Köln waren und 2002 in München.
, aber von meinem Vater weiß ich, dass sie mit Conrad Digital und den Loks mit Panto-Funktion 2001 auf der Messe in Köln waren und 2002 in München. 
 Das ist ja deutlich teurer als neue C-Digital Komponenten. Was verlangt ihr für so ein Set aus den alten Conrad Komponenten? 300€, oder so?
Das ist ja deutlich teurer als neue C-Digital Komponenten. Was verlangt ihr für so ein Set aus den alten Conrad Komponenten? 300€, oder so? oder es den gleichen Artikel zum Sofortkaufpreis gibt.
oder es den gleichen Artikel zum Sofortkaufpreis gibt.