
Elmar.
Schön, dass es im Prinzip geklappt hat. Zu der Märklin-Lok: Wenn es ein neueres Exemplar ist, sollte sie einen Decoder haben, da es analoge Loks nach meinem Kenntnisstand nicht mehr gibt (elektronischer Umschalter ca. gleicher Preis wie Decoder). Diese Loks sollten mit DCC zu fahren sein. Falls auch die LGB Lok einen Decoder hat: Solche Elektroniken kommen im Analogbetrieb mit Pulsweitenmodulation nicht gut zurecht.
Ein BTS 7960 könnte in der Tat bei grösserem Stromverbrauch helfen, sofern Du nicht auf das neue (teure) DCC-EX Motorshield zurückgreifen willst. Ich habe das provisorisch für einen Freund gemacht, als das DCC-EX Shield vergriffen war. Wenn Du nur einen Kanal brauchst und die Programmierung weiter mit dem L298 machst, brauchst Du nur ein paar Jumper-Kabel. Ist in DCC-EX beschrieben. Ich werde das später auch hier noch mal diskutieren.
Gruss
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #51 von
md95129
, 23.02.2024 09:38
#51 von
md95129
, 23.02.2024 09:38
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.093 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #52 von
Geisterbahn
, 23.02.2024 18:14
#52 von
Geisterbahn
, 23.02.2024 18:14
Henner
Danke für deine Antwort .
Märklin Lok war eine alte analoge , LGB analog ( New Old Stock ) aus Lehmann Nürnberg Zeiten .
Die Loks haben beide mit dem Messgerät ca. 400mA gehabt .
Was mich so stutzig macht ist das ab 580mA der Wert sofort nach oben schießt auf über 1500mA und dann abschaltet ,
und effektiv nur 650mA sind .
Werde mal das BTS 7960 mit einfügen .
Gruß Elmar
- Geisterbahn
-
Beiträge: 3 Registriert am: 12.02.2023 Spurweite H0, H0e, G

RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #53 von
md95129
, 23.02.2024 18:21
#53 von
md95129
, 23.02.2024 18:21
Sind die 3 Brücken auf dem Motorshield drinnen und die Beinchen abgezwickt/ausgebogen? Sieht so aus, als ob der Strom nicht richtig gemessen wird.
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.093 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #54 von
Geisterbahn
, 23.02.2024 18:31
#54 von
Geisterbahn
, 23.02.2024 18:31
Ja , alles nach deiner Anleitung .
Hab sogar noch einen Kühler angebaut .
L298 liegt noch hierum den werde ich mal einlöten und Testen .
Gruß Elmar
- Geisterbahn
-
Beiträge: 3 Registriert am: 12.02.2023 Spurweite H0, H0e, G
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #55 von
JörgBehrens
, 24.02.2024 13:36
#55 von
JörgBehrens
, 24.02.2024 13:36
Moin,
ich hatte vor einigen Wochen mir bei e Bay einen entsprechende Bausatz mit allem Zubehör wie z.B. Netzteile für 55€ bestellt und bin nun endlich dazu gekommen diesen zusammen zu bauen und in Betrieb zu nehmen.
Der Zusammenbau der Hardware - inkl. verbiegen des VIN Pins - war super einfach und geht ganz ohne Löten.
Das Einspielen der Software ist im Prinzip auch einfach, hatte für mich als Mac-Nutzer allerdings ein paar kleine Fallstricke:
- Das automatische Installationspaket funktionierte nicht. Die manuelle Installation funktioniert und ist wirklich einfach.
- Der Installer für die DCC-EX-Commandstation ist sehr, sehr behäbig. Man klickt auf etwas und es passiert Minutenlang rein gar nichts. Und plötzlich poppt dann der gewünschte Bildschirm auf
- Für den Netzwerk Access Point musste ich ein Kennwort vergeben. Bei leerem Kennwort, wollte sich mein iPhone nicht vebinden - der Button war ausgegraut.
Sowohl mit der SRCP Client App auf dem iPhone als auch mit meinem selbstentwickelten WLAN Handregler konnte ich mich sofort verbinden und eine Lok steuern.
Ein schönes Projekt.
Viele Grüße
Jörg
This World today is a mess. (Donna Hightower)
- JörgBehrens
- CityNightLine (CNL)
-
Beiträge: 1.860 Registriert am: 30.04.2005 Gleise K und C Spurweite H0, Z, 1 Steuerung CS 2 und CS3 Stromart AC, Digital

RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #56 von
Kastenlok
, 24.02.2024 19:55
#56 von
Kastenlok
, 24.02.2024 19:55
Hallo Jörg,
wenn man bei der Installation kein eigenes Passwort für den Accesspoint eingibt, bildet DCC-EX selbst eines.
Angenommen, das WLAN heißt DCCEX_1ab2cd, dann heißt das Passwort PASS_1abd2cd. Siehe auch unter DCC-EX Website (WiFi Connection).
Viele Grüße
Bernhard
- Kastenlok
- RegionalExpress (RE)
-
Beiträge: 64 Registriert am: 12.10.2020

RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #57 von
Tyresan
, 25.02.2024 18:34
#57 von
Tyresan
, 25.02.2024 18:34
Weiter geht es mit einer Beschreibung zu möglichem Zubehör.
Anmerkung:
- Ich stelle hier nur eine kleine Auswahl an Zubehör und Anschlussmöglichkeiten vor. Auf der Seite des DCC-EX Projektes ist noch mehr Zubehör aufgeführt. DCC-EX Controlling Accessories
- Interne Pins mit denen die EX-CommandStation arbeitet nennen sich VPINs und sind zu teilen standardmäßig an physische Pins am ESPDuino gemappt. Wird eine bestimmte Anzahl an VPINs durch die Verwendung von Erweiterungsmodulen überschritten, müssen zusätzliche VPINs die I2C Adressen gemappt werden. Mehr dazu unten.
Zwar stellt der ESPDuino einige physische Pins (GPIO) zur Verfügung, allerdings sind viele dieser für den Motorschield reserviert oder sonst nicht frei nutzbar. Glücklicherweise unterstützt das DCC-EX Projekt den I2C Datenbus. Dadurch ist es möglich Ein- und Ausgänge (GPIO) zu erweitern und Servomodule (PWM Module) anzuschließen.
Die Ein- und Ausgänge (GPIO) können für Hallsensoren, Reed Kontakte, Schalter, Leds, Ansteuerung anderer Module dienen. Sie sind also frei nutzbar als Ein- oder Ausgang!
Servos können ebenfalls vielseitig eingesetzt werden, wie für Weichen, Signale, Entkuppler, Tore, oder kleine Randszenen neben der Bahn.
Das DCC-EX Projekt empfiehlt verschiedene Module zur Verwendung, dessen zentraler Microchip im Treibersatz der Software hinterlegt ist. Somit ist es auch möglich, die Schaltung, um die Microchips herum selbst zu bauen.
Die unterstützten Microchips sind für (GPIO) Pinerweiterungen:
MCP23017, MPC23008, PCF8574
Und für Servo-Module:
PCA9685
Sucht man nach dieses Microchips im Internet findet man diese auf einer Vielzahl unterschiedlich bestückter Platinen mit Vorbeschaltung und Anschlussmöglichkeiten. Wer etwas Geld sparen möchte, bestellt sich den für sich passenden Microchip separat und steckt sich die Schaltung auf Breadboards oder lötet sich die Platinen selbst.
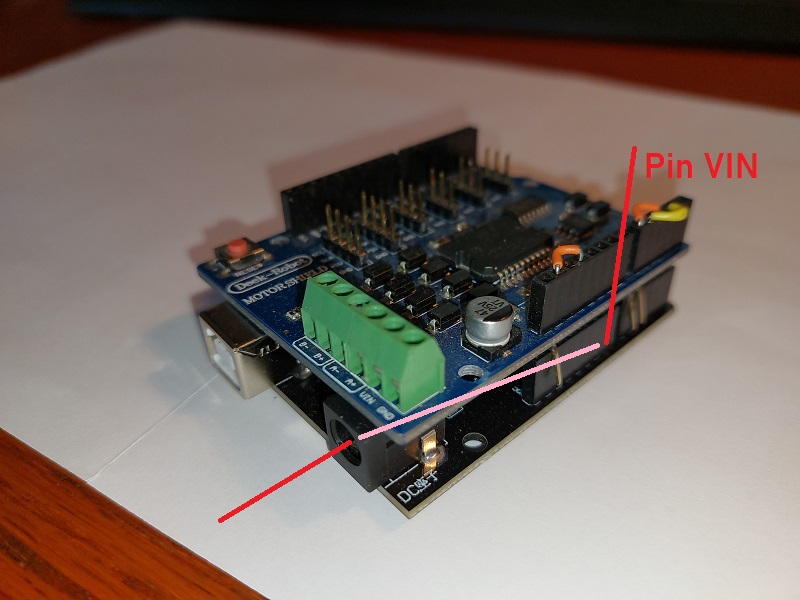
Da die 5V des ESPDuino nicht genug Leistung für Servos liefert muss hier noch für eine extra Spannungsversorgung gesorgt werden. In meinen einfachen Testaufbau – mit drei Hallsensoren und zwei Weichen-Servos – habe ich die Eingangsspannung einfach über den VIN Pin des Motorshields abgegriffen (der VIN Pin wird direkt vom Spannungseingang über den Arduino durchgeschliffen) und auf einen 5V Festspannungsregler gelegt.
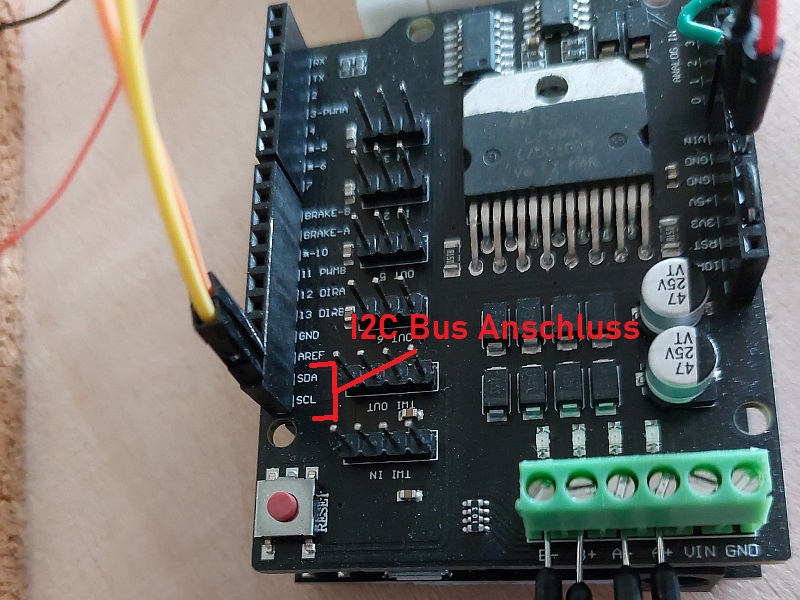
Der I2C Bus ist ein zwei-Draht Bus System, welches von einem Modul zur nächsten durchgeschliffen, oder in Sternverdrahtung verbunden werden kann. Wird eine bestimmte Anzahl an Modulen überschritten müssen Endwiderstände (Pullups) auf den Modulen ausgelötet werden. Siehe dazu die Onlinedokumentation: DCC-EX Pull-ups
Jedes Modul benötigt zur einwandfreien Kommunikation eine individuelle I2C Adresse. Diese wird über tief gezogene Pins (auf GND) am jeweiligen Microchip eingestellt. Fertige Module haben eine voreingestellte Adresse, die geändert werden kann (Lötbrücken, Dip-Schalter). Somit kann ein einzelnes Modul immer ohne Einstellung der Adresse direkt am Arduino angeschlossen werden.
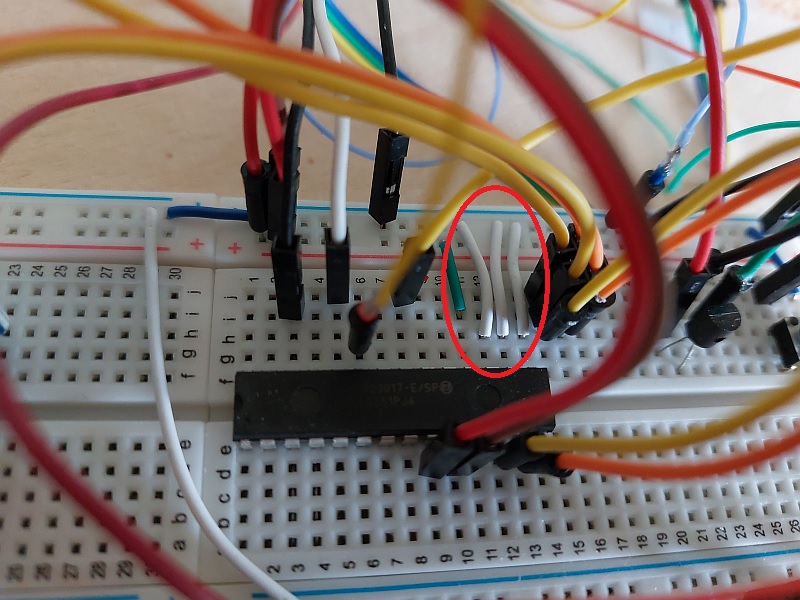
Die hier eingestellte Adresse über die vier weißen Kabel auf Pin 15-17 ergibt die Adresse 0x20.
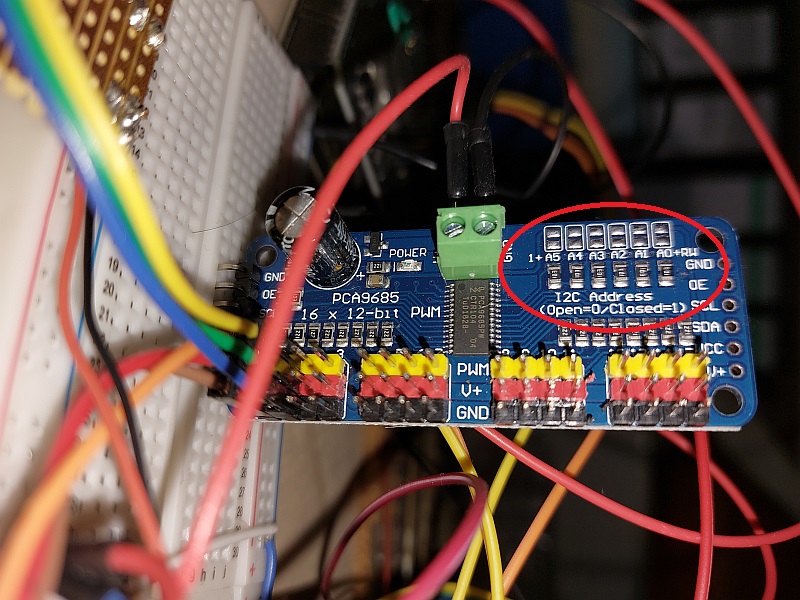
Das Servomodul hat die Lötbrücken A0 bis A5 offen und somit die Adresse 0x40
Standardadressen für Module sind:
VPIN Erweiterung (GPIO) mit MCP23017 Microchip ist meistens 0x20
Servo Modul mit PCA9685 Microchip ist meistens 0x40
Für bis zu zwei MCP23017 und zwei PCA9685 sind jeweils schon „VPINs“ vergeben. Möchte man mehr Module verwenden, müssen die VPIN Adressen den jeweiligen I2C Adresssräumen zugewiesen werden. Mehr dazu auf der Projektseite: DCC-EX Input and Output Accessories and Expanders
Beispielaufbau:
In meiner Experimentierumgebung habe ich mich vorerst für eine gemischte Lösung entschieden. Später für einen festen Aufbau sollen die Breadboards den gelöteten Varianten weichen, um eine höhere Betriebssicherheit zu erreichen.
Ich habe mir das Servomodul fertig bestückt bestellt und die Pinerweiterungen (GPIO) als Microchip. Wie die Module angeschlossen/verdrahtet werden müssen ist in den jeweiligen Kategorien des obigen Links beschrieben.
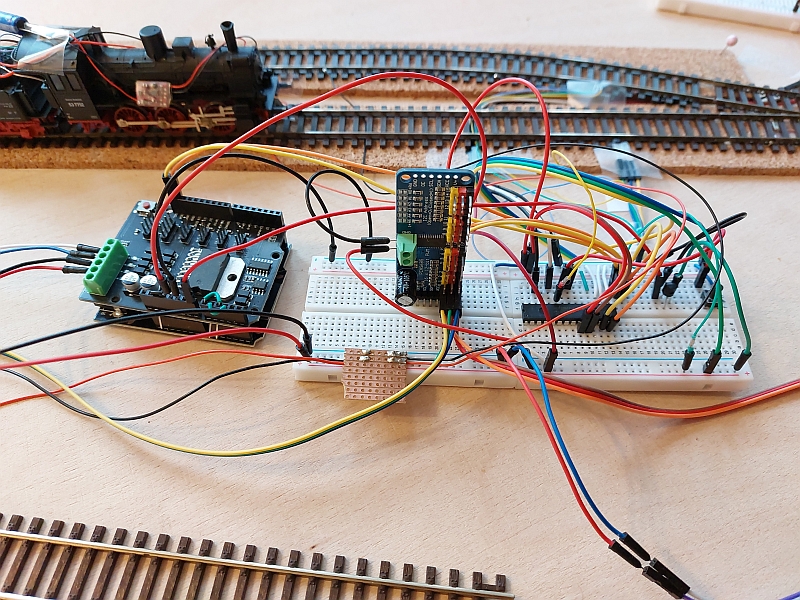
Zusammengesteckt schaut es so aus.
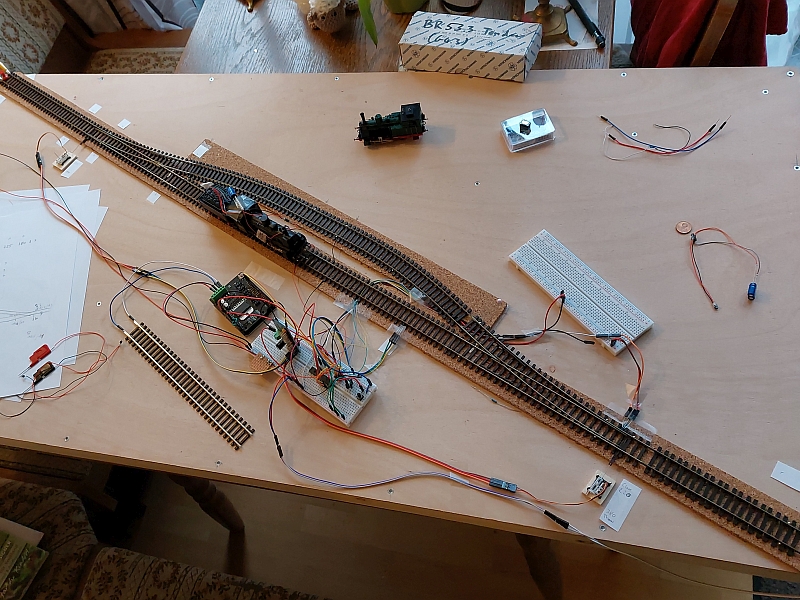
Angeschlossen sind jetzt drei Hallsensoren, ein Taster und zwei Micro-Servos für die Weichen. Die Weichen sind umgebaut, so dass sie über die Weichenzungen polarisieren. Die Gleisspannung habe ich mehrfach ans Gleis geführt.
Im nächsten Teil zeigen ich mit meinen Testaufbau eine Programmierung und Demonstration, die alle hier erwähnten Komponenten mit einbezieht.
Was ich gerade noch umsetzte, ist die automatische Blockreservierung und somit ein dynamisches System welches sich hervorragend auf größere Layouts skalieren lässt.
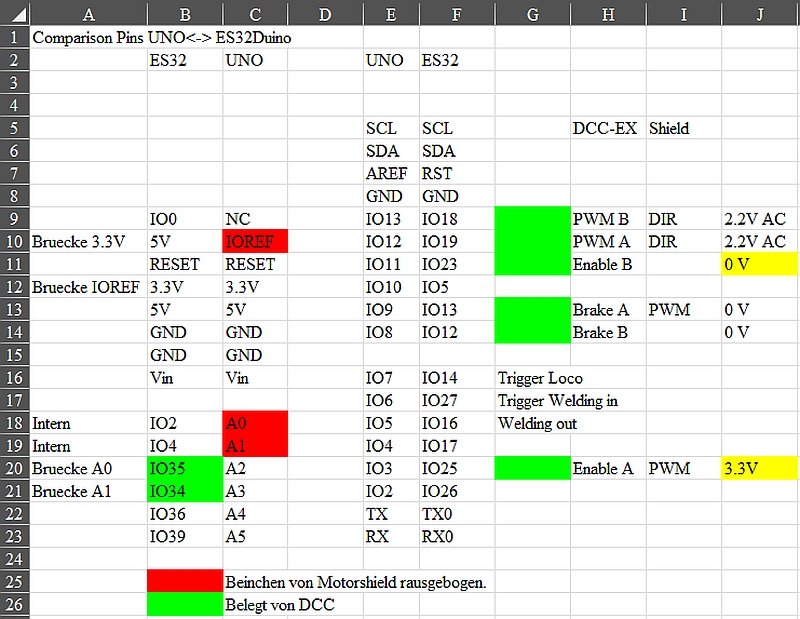
Als Anhang gibt es noch die Belegung des ESPDuino im Vergleich zum ArduinoUno und die durchgeschliffenen Kontakte über das Motorshield:
Mit freundlichen Grüßen
Mark (Tyresan)
- Tyresan
- S-Bahn (S)
-
Beiträge: 14 Registriert am: 24.08.2023 Ort: Berlin, Lichterfelde Gleise Tillig-Elite Spurweite H0, H0e Steuerung DCC-EX Stromart DC, Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #58 von
Kastenlok
, 26.02.2024 10:58
#58 von
Kastenlok
, 26.02.2024 10:58
Hallo zusammen,
nun ist auch meine DCC-EX-Zentrale auf ESP32-Basis fertig (eine mit MEGA-WiFi-Klon hatte ich schon) und sie funktioniert auch mit einer Einschränkung, auf die ich später zurückkomme.
Zunächst einmal hatte Onkel Wu unsauber gearbeitet und die Anschlussbeinchen des Motorshields waren mit Lötzinnbatzen verschmiert. Da musste ich erst überschüssiges Zinn abnehmen bzw. verteilen. Ansonsten war die Hardware schnell aufgebaut. Vorsorglich habe ich beim Motorshield wieder zwei Lötstifte der Anschlussklemmen gekürzt, weil die auf der Stromversorgungsbuchse aufsaßen und ich deswegen bei meiner Mega-DCC-EX Kontaktprobleme bei den Anschlusspins hatte.
Bei der Installation hatte ich zwei Probleme, die auf eigene Schusseligkeit zurückzuführen waren. Nach „Load“ erhielt ich die zweisprachige Meldung „Error during build: Plattform ‚esp32:esp32“ nicht gefunden: Plattform nicht installiert“. Klar hatte ich im Menu „Manage the Arduino CLI“ gelesen, dass das Command Line Interface installiert werden muss, dann aber erst mal in der Anleitung weitergelesen und nur bei „Enable extra platforms“ den ESP32 aktiviert, nicht aber das CLI installiert. Also nochmal zurück. Diese Installation war dann auch der einzige Vorgang, der länger gedauert hat, ich schätze so etwa zwei Minuten. Ansonsten – mein zweiter Fehler – hatte ich mich gewundert, dass das Fenster „Advanced Configuration“ nicht erschien, wo ich doch Henners „myAutomation.h“ eintragen wollte. Ich hatte wieder nicht aufgepasst und mich streng nach dem Screenshot „Install EX-CommandStation“ in der Anleitung gerichtet. Wenn man aber die „Advanced Config“ haben will, muss man natürlich auch den Schalter „Advanced Config“ in „Install EX-CommandStation“ aktivieren! Das steht auch in der Anleitung ein Stück unter dem Screenshot… Dann hat alles geklappt.
Ein bisschen Erfahrung mit dem EngineDriver und der EX-Toolbox hatte ich schon und so konnte ich die Zentrale ohne lange Vorbereitung in Betrieb nehmen. Fahren DCC und DC auf Kanal A und B OK, Decoder auslesen auf Kanal B auch, aber: Decoder auslesen auf Kanal A führt zu einer Fehlermeldung. Ich habe die Anordnung der Brücken geprüft und diese zusätzlichen Verbindungen auch durchgemessen, alles OK. Dann das Motorshield gegen ein baugleiches getauscht, selbes Problem. Gut, damit könnte ich leben, aber vielleicht gibt es doch eine Lösung?
Fazit: gute Anleitung, äußerst preisgünstige Zentrale und die Probleme bei der Installation waren auf eigene Schusseligkeit zurückzuführen. Einziges, aber verschmerzbares Problem ist der Fehler bei Kanal A.
Vielen Dank an Henner und Mark für die hervorragende Aufbereitung des Themas. Die kompakte Darstellung mit Praxiserfahrungen weckt die Lust am Ausprobieren und erspart mühevolles Suchen der Informationen im Web!
Viele Grüße
Bernhard
- Kastenlok
- RegionalExpress (RE)
-
Beiträge: 64 Registriert am: 12.10.2020
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #59 von
JörgBehrens
, 26.02.2024 11:48
#59 von
JörgBehrens
, 26.02.2024 11:48
Hallo Bernhard,
ich bin auch eher auf dem ESP32 trip. Daher meine Frage: Welche Hardware hast Du benutzt? Welches Board und welches Motorshield? Dann würde ich nämlich auch zu ESP32 und möglicherweise zum M5Stack wechseln.
Viele Grüße
Jörg
This World today is a mess. (Donna Hightower)
- JörgBehrens
- CityNightLine (CNL)
-
Beiträge: 1.860 Registriert am: 30.04.2005 Gleise K und C Spurweite H0, Z, 1 Steuerung CS 2 und CS3 Stromart AC, Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #60 von
Kastenlok
, 26.02.2024 12:32
#60 von
Kastenlok
, 26.02.2024 12:32
Hallo Jörg,
ich habe die im Ausgangsthread verlinkten Platinen bei AliExpress bestellt.
Es gibt aber auch ESPDuinos mit dem "altmodischen" USB-B-Anschluss, zum Beispiel hier. Für den Arduino UNO bekommt man Gehäuse, bei denen dieser Anschluss Bestandteil der Platinenbefestigung ist. Die ESPDuino-Platine sollte da auch rein passen. Ein Gehäuse wäre schon schick, und deswegen bestelle ich mir vielleicht mal eine solche Platine. Vielleicht warte ich auch auf RailCom, bevor ich die nächste Zentrale baue.
Viele Grüße
Bernhard
- Kastenlok
- RegionalExpress (RE)
-
Beiträge: 64 Registriert am: 12.10.2020
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #61 von
md95129
, 26.02.2024 15:13
#61 von
md95129
, 26.02.2024 15:13
Zitat von Kastenlok im Beitrag #58
... Decoder auslesen auf Kanal A führt zu einer Fehlermeldung. Ich habe die Anordnung der Brücken geprüft und diese zusätzlichen Verbindungen auch durchgemessen, alles OK. Dann das Motorshield gegen ein baugleiches getauscht, selbes Problem. Gut, damit könnte ich leben, aber vielleicht gibt es doch eine Lösung?
Fazit: gute Anleitung, äußerst preisgünstige Zentrale und die Probleme bei der Installation waren auf eigene Schusseligkeit zurückzuführen. Einziges, aber verschmerzbares Problem ist der Fehler bei Kanal A.
Vielen Dank an Henner und Mark für die hervorragende Aufbereitung des Themas. Die kompakte Darstellung mit Praxiserfahrungen weckt die Lust am Ausprobieren und erspart mühevolles Suchen der Informationen im Web!
Viele Grüße
Bernhard
Bernhard,
Schau mal im log-File nach oder setze Kanal A explicit auf PROG: 3 Puenktchen/DCC-EX/Handlung/Spur-Betriebsleiter und dann A auf PROG setzen. Das Deutsch ist leider etwas "Pidgin".
Gruss
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.093 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #62 von
JörgBehrens
, 26.02.2024 16:10
#62 von
JörgBehrens
, 26.02.2024 16:10
Hallo Bernhard,
sorry, der Ausgangsbeitrag war schon von meinem Radar verschwunden.
Wer lesen kann ist klar im Vorteil!
Viele Grüße
Jörg
This World today is a mess. (Donna Hightower)
- JörgBehrens
- CityNightLine (CNL)
-
Beiträge: 1.860 Registriert am: 30.04.2005 Gleise K und C Spurweite H0, Z, 1 Steuerung CS 2 und CS3 Stromart AC, Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #63 von
Kastenlok
, 26.02.2024 17:02
#63 von
Kastenlok
, 26.02.2024 17:02
Hallo Henner,
genau so war ich vorgegangen. Hier ein Screenshot, Aktion war Lesen der DCC-Adresse: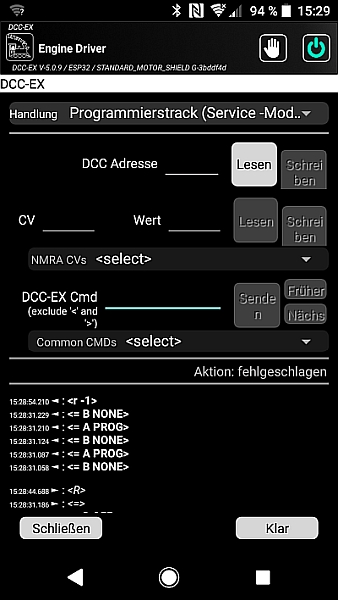
Zehn Minuten später habe ich es nochmals probiert und einen Screenshot vom einschlägigen Teil des Logfiles gemacht: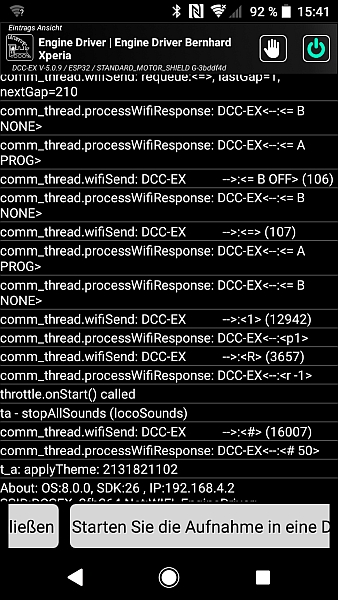
Um sicherzugehen, dass der (ZIMO-)Decoder nicht zickt, habe ich den identischen Vorgang mit der MEGA-DCC-EX nachvollzogen. Da funktionert es.
Viele Grüße
Bernhard
- Kastenlok
- RegionalExpress (RE)
-
Beiträge: 64 Registriert am: 12.10.2020
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #64 von
Kastenlok
, 28.02.2024 15:11
#64 von
Kastenlok
, 28.02.2024 15:11
Heute habe ich DCC-EX auf einem anderen, baugleichen ESPDuino aus derselben Lieferung installiert. Ergebnis identisch, kein Auslesen auf Kanal A - und sogar sporadische Lesefehler auf Kanal B.
Das Fahrzeug, das ich zum Testen verwendet habe, hat einen ZIMO-MX622 mit Softwarestand 40.5. Gegencheck mit einer anderen Lok mit ESU LokPilot Micro V4.0 MM / DCC / SX + PowerPack: es funktioniert! Bezogen auf den ZIMO-Decoder: ESP-DCC-EX mit Version 5.0.9 funktioniert nicht, MEGA-DCC-EX mit 5.0.7 funktioniert. Zum Ausprobieren mit weiteren Decodern bin ich noch nicht gekommen.
Der EngineDriver verhält sich seltsam. Wenn ich auf der Seite für das Programmiergleis bin, kann ich unter "DCC-Adresse" nur lesen, nicht schreiben. Wenn ich eine Adresse eingebe, wird der "Schreiben"-Button aktiv. Wenn ich diesen anklicke, dann wird der Adresswert gelöscht und der "Schreiben"-Button ausgegraut. Eine weitere Reaktion des Systems erfolgt nicht. Eine Zeile tiefer, wo einzelne CVs gelesen und geschrieben werden können, funktioniert es (und die dort geänderte Adresse kann dann auch eine Zeile höher unter "DCC-Adresse" ausgelesen werden). Das hat jetzt aber nichts mit dem ESPDuino zu tun, sondern mit meiner MEGA-DCC-EX ist es genauso (auf der läuft allerdings noch die DCC-EX-Version 5.0.7).
Außerdem habe ich Henners Umschaltung der Ausgänge mittels der in seiner myAutomation.h definierten Fahrstraßen erprobt. Mich wundert, dass es für diesen Vorgang im Fahrstraßenmenu keine Quittung gibt. Ob es funktioniert hat, sieht man nur im DCC-EX-Menu.
Viele Grüße
Bernhard
Ergänzung: Stahlblauberlin hatte im Thread geschrieben: "Das programmieren geht immer, nur das Lesen der CVs kann haarig sein. ....insbesondere bei Lokomotiven mit kleiner Stromaufnahme.". Tatsächlich handelt es sich bei dem Fahrzeug mit dem MX622 um einen Triebwagen, der außer einem kleinen Mabuchi-Motor keine weiteren Verbraucher hat. Ich hatte ja nur das Auslesen getestet und das hat nicht funktioniert. Nun auch der Versuch, die Adress-CV zu ändern: ebenfalls Fehlschlag im Kanal A.
- Kastenlok
- RegionalExpress (RE)
-
Beiträge: 64 Registriert am: 12.10.2020
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #65 von
Tyresan
, 28.02.2024 22:59
#65 von
Tyresan
, 28.02.2024 22:59
Hallo Bernhard,
leider bin ich noch nicht technisch so tief in der Thematik drin, habe aber schon davon gelesen dass es Probleme beim erkennen der Decoder gibt, wenn eben diese zu wenig Stromaufnahme (inklusive Verbraucher) haben.
Ich meine dass die Schwellen zur Erkennung aber eingestellt werden können.
Schau dazu mal den Link an:
https://dcc-ex.com/reference/tools/diagn...ck-command.html
Zu dem Thema gibt es noch mindestens eine andere Seite innerhalb des DCC-EX Projektes. Musst du mal mit entsprechenden Begriffen nach suchen.
Leider antworte ich gerade vom Handy und kann den Link nicht ao schön präsentieren. ;)
Mit freundlichen Grüßen
Mark (Tyresan)
- Tyresan
- S-Bahn (S)
-
Beiträge: 14 Registriert am: 24.08.2023 Ort: Berlin, Lichterfelde Gleise Tillig-Elite Spurweite H0, H0e Steuerung DCC-EX Stromart DC, Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #66 von
Kastenlok
, 29.02.2024 21:10
#66 von
Kastenlok
, 29.02.2024 21:10
Hallo Mark,
vielen Dank für den wertvollen Hinweis - erste Versuche mit den Diagnose-Befehlen habe ich mal gemacht, die andere Seite, von der Du gesprochen hast könnte diese sein - zu der es einen weiteren Link bezüglich des Motorshields gibt. Ich werde mich am Wochenende mal etwas ausgiebiger damit beschäftigen.
Viele Grüße
Bernhard
- Kastenlok
- RegionalExpress (RE)
-
Beiträge: 64 Registriert am: 12.10.2020
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #67 von
Johannes W
, 02.03.2024 23:27
#67 von
Johannes W
, 02.03.2024 23:27
Hallo Henner,
Hallo Mark,
mit diesem Projekt habt ihr mich richtig glücklich gemacht. Wie ich schon schrieb, hielt ich mich von solchen Microcomputer Dingen immer fern. Aber die Möglichkeiten, die auch ich dabei erkannt hatte, reizten mich immer. Nun habe ich das vorgestellte Projekt Punkt für Punkt nachgebaut. Was soll ich sagen: Bis auf ein paar Anlaufschwierigkeiten ( vergessen, gleich im ersten Schritt, die Programmierumgebung für den ESP32 einzuschalten) und daß mein Win10/ 32bit Computer irgendwie Schwierigkeiten mit dem Laden auf den ESPduino hatte, konnte ich doch mit Geduld und dann über den Laptop das System zum Laufen bringen. Programmieren kann ich zwar immer noch nicht- bei Zeiten will ich mich mal damit auseinandersetzen- aber ich hatte trotzdem ein riesiges Erfolgserlebnis. Die Schaltung hat auf Anhieb funktioniert. Ich kann´s fast nicht glauben.
Daher: Vielen Dank Euch Beiden.
Hier noch ein paar Fotos:
Bild entfernt (keine Rechte)
Bild entfernt (keine Rechte)
Bild entfernt (keine Rechte)
Die Drahtbrücken und die weggebogenen Stifte habe ich mit Schrumpfschlauch isoliert. Da ich keinen 270Ohm Widerstand hatte, nahm ich zweimal 560Ohm parallel.
Bild entfernt (keine Rechte)
Alles ist zusammengebaut, die App ist geöffnet.
Bild entfernt (keine Rechte)
Gleisspannung einschalten
Bild entfernt (keine Rechte)
Und beide Loks lassen sich wunderbar regeln.
Grüße
Johannes
- Johannes W
- InterRegioExpress (IRE)
-
Beiträge: 315 Registriert am: 18.09.2021 Gleise Peco Code75, Roco-line Spurweite H0 Stromart DC, Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #68 von
md95129
, 03.03.2024 19:34
#68 von
md95129
, 03.03.2024 19:34
Ich werde demnächst einen Beitrag speziell zum Programmieren schreiben (mit Tipps).
Gruss
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.093 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #69 von
Kastenlok
, 04.03.2024 16:39
#69 von
Kastenlok
, 04.03.2024 16:39
Hallo zusammen, mein Problem mit dem Auslesen ist gelöst.
Nachdem das Auslesen des Decoders (ZIMO MX622) im Triebwagen mit einem Mabuchi-Motor und sonst keinen weiteren Verbrauchern mit Kanal A nicht (und B auch nicht immer) funktioniert hat, habe ich eine Reihe anderer Fahrzeuge durchprobiert mit Lenz Silver mini, ESU LoPi 4 und ZIMO MX621 – hat alles geklappt. Nur ein weiterer Triebwagen ebenfalls mit MX622, der zwei parallelgeschaltete Motoren hat, wollte nicht. Sollte auch hier der Quittungsstrom nicht ausreichen? Seltsam. Ich habe dann den Decoder mit MXULFA und ZCS ausgelesen und nachgesehen, ob vielleicht in CV 144 irgendwelche Sperren gesetzt sind. Das war nicht der Fall. Ich bin aber auf die CV 122 gestoßen. Dort kann man einstellen, ob die ACK-Impulse als normale Quittung durch Einschalten der Motor- und Lichtausgänge gegeben werden oder als Hochfrequenz-Stromimpulse als Maßnahme, wenn Motor/Licht nicht ausreicht. Das Bit für die Hochfrequenzimpulse war in beiden Decodern gesetzt, warum auch immer. Nach dem Löschen ließen sie sich einwandfrei auslesen und programmieren. Hätte nicht gedacht, dass ich mich mal über das „ACK-Geknatter“ freue 😉.
Bei diesem Thema gibt es übrigens einen Bezeichnungsfehler in JMRI Decoder Pro. Der entsprechende Punkt ist dort als „POM-Quittierung“ (also für Hauptgleisprogrammierung) bezeichnet, er betrifft aber die Programmierung auf dem Programmiergleis.
Vielen Dank nochmal an Mark für die Hinweise zur Fehlersuche!
Viele Grüße
Bernhard
- Kastenlok
- RegionalExpress (RE)
-
Beiträge: 64 Registriert am: 12.10.2020
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #70 von
Kastenlok
, 05.03.2024 11:45
#70 von
Kastenlok
, 05.03.2024 11:45
Vorbemerkung: dieser Beitrag ist nur für diejenigen von Bedeutung, die das Programm für den Handregler vor dem 5.3.2024 heruntergeladen haben.
Hallo Henner,
heute habe ich den Fahrregler auf einem Breadboard zusammengestöpselt.
Leider hat er nicht auf Anhieb funktionert. Versuche mit zwei Handys (Android 8 und 14) führten zu keinem Erfolg. Der Arduino wurde zwar als Leonardo erkannt, es kamen aber keine Daten im EngineDriver an. Um Fehler an der "USB-Kabelei" auszuschließen, habe ich einen ESP32 an die Handys Daten schicken und diese mit einer USB-Terminalapp anzeigen lassen - das funktionierte. In meiner Verzweiflung wollte ich dann den Sketch neu aufspielen und habe den Arduino, wie in der Anleitung beschrieben, bei gedrücktem "Licht"-Knopf an den PC angesteckt. Und was ist passiert? In der Eingabezeile des seriellen Monitors wurden Befehle des Handreglers angezeigt! Gegenprobe: den Regler bei gedrücktem "Licht"-Knopf ans Handy angeschlossen und es ging!
Damit das Programm so funktioniert wie erwartet, und der "Licht"-Knopf nur beim Umprogrammieren gedrückt werden muss, habe ich das Programm im setup abgeändert:
Statt
2
3
if(digitalRead(Licht)){ // Wenn Licht beim Einschalten gedrückt wird, hängt sich der Arduino auf, kann aber programmiert werden
while(true); // Dies wurde gemacht, um zu verhindern, dass ein bereits programmierter Chip die Tastatur über USB ansteuert.
}
habe ich geschrieben (korrigierte Fassung):
2
3
if(!digitalRead(Licht)){ // Wenn Licht beim Einschalten gedrückt wird, hängt sich der Arduino auf, kann aber programmiert werden
while(true); // Dies wurde gemacht, um zu verhindern, dass ein bereits programmierter Chip die Tastatur über USB ansteuert.
}
Jetzt klappt's!
Viele Grüße
Bernhard
- Kastenlok
- RegionalExpress (RE)
-
Beiträge: 64 Registriert am: 12.10.2020
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #71 von
md95129
, 05.03.2024 11:56
#71 von
md95129
, 05.03.2024 11:56
Komisch,
bei mir funktioniert es anders rum. Du kannst den Fahrregler über USB an den PC hängen und einen Text-Editor starten. Dann ein Reset auf den Arduino, einmal mit und einmal ohne gedrückten Taster. Die richtige Stellung ist, wenn sich der Arduino "tot" stellt, weil er sich aufhängt. Bei falscher Stellung kommen Zeichen auf dem Bildschirm an. Es geht ja nur darum, dass sich der Prozessor während des Programmierens nicht als Keyboard ausgibt. Im Prinzip hast Du das ja genau so gemacht.
Gruss
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.093 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #72 von
Kastenlok
, 05.03.2024 14:34
#72 von
Kastenlok
, 05.03.2024 14:34
Hallo Henner,
Zitat von md95129 im Beitrag #71
Dann ein Reset auf den Arduino, einmal mit und einmal ohne gedrückten Taster.
bei beiden Varianten erscheinen nach wenigen Sekunden die Zeichen des Arduinos im Texteditor - mit meinem genialen
Zitat von Kastenlok im Beitrag #70habe ich ja verhindert, dass die Endlosschleife jemals ausgeführt wird
while(false);
 .
.Ich habe die Invertierung jetzt in den Aufruf von digitalRead gepackt und jetzt funktioniert die Sache so, dass bei gedrücktem Knopf bei Reset das Programm in der Endlosschleife landet. Meinen Beitrag (#70) habe ich entsprechend abgeändert.
Viele Grüße
Bernhard
- Kastenlok
- RegionalExpress (RE)
-
Beiträge: 64 Registriert am: 12.10.2020
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #73 von
md95129
, 05.03.2024 15:22
#73 von
md95129
, 05.03.2024 15:22
Das Geheimnis ist gelöst: Meine Taster (mit 2 Anschlusspins-noch in den USA gekauft) waren Öffner, keine Schliesser! Damit hatte ich eine "Hardwareinvertierung". Da solche Taster extrem selten sind, habe ich es nicht gemerkt. Das Programm im obigen Link habe ich geändert. Danke fürs Aufspüren des Fehlers. Verrückterweise ist das bei den Funktionstasten nicht aufgefallen, da die Momenttasten (Hupe) nur auf eine Änderung reagieren und die Funktionen wie Licht eben beim Loslassen schalten. Ich habe das auch im Programm geändert.
Gruss
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.093 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #74 von
gabischatz
, 05.03.2024 18:39
#74 von
gabischatz
, 05.03.2024 18:39
Zitat von md95129 im Beitrag #40
Der Handregler verwendet den Arduino Pro Micro z.B. hier. Die Schaltung dazu ist sehr einfach
Hi, ich bin etwas verwirrt, ich kann mir nicht vorstellen, was genau die Schaltung und der dazugehörige Code macht.
Was ich denke, zu versteht ist, dass du dein Handy an den Arduino anschließen willst und an dem sind zwei Taster und ein Schalter und ein Potentiometer.
Aber dann hört es bei mir schon auf.
Könntest du nicht ein kurzes Video machen?
Mir fällt es dann leichter, zu verstehen, was du da gerade meinst.
LG Lutz
- gabischatz
- S-Bahn (S)
-
Beiträge: 21 Registriert am: 28.04.2023

RE: Analog/DCC Regler/Zentrale ohne PC mit Funk unter 10€?
![]() #75 von
md95129
, 05.03.2024 21:58
#75 von
md95129
, 05.03.2024 21:58
Lutz,
Der Handregler ist nicht notwendig, um mit dem System Loks zu steuern. Die Zentrale und ein Handy genügen. Es gibt nun Modellbahner, die nicht gerne auf dem Handy "wischen " um ein Fahrzeug zu bedienen. Für die ist der Zusatz gemacht. Er wird an das Handy angesteckt und erlaubt jetzt das Fahren mit einem physikalischen Knopf.
Gruß
Henner,
ex-Donkey Doktor der EDH Lumber
Schamlose Selbstbeweihräucherung: Eigenbauten eines alten Neulings.
US Waldbahnen/Echtdampf-Eigenbau
- md95129
- EuroCity (EC)
-
Beiträge: 1.093 Registriert am: 15.01.2017 Ort: Berlin Gleise IIm Echtdampf,H0m Steuerung DCC Eigenbau Stromart Digital
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Uhlenbrock Daisy Funk
Erstellt im Forum Elektrik und Elektronik von krummi - 3
- 460
- Letzter Beitrag von
krummi

02.04.2023
- Uhlenbrock Daisy Funk
-
- Märklin 7223 FUNK-ENTSTÖRBRÜCKE ???
Erstellt im Forum Anfängerfragen von ChristianReg - 3
- 367
- Letzter Beitrag von
ChristianReg
01.11.2022
- Märklin 7223 FUNK-ENTSTÖRBRÜCKE ???
-
- Digitalzentrale FCC von MTTM / Handregler / Funk ?
Erstellt im Forum Anfängerfragen von LokoBoy - 2
- 638
- Letzter Beitrag von
RolandH
02.05.2022
- Digitalzentrale FCC von MTTM / Handregler / Funk ?
-
- Die Funk-Loconetbox
Erstellt im Forum Digital von - 1
- 526
- Letzter Beitrag von
Trapeztafel
15.09.2017
- Die Funk-Loconetbox
-
- Funk-Digitalsteuerung Eigenentwicklung
Erstellt im Forum Software und Hardware von - 138
- 78059
- Letzter Beitrag von
fschum
15.01.2024
- Funk-Digitalsteuerung Eigenentwicklung
-
- Welchen Funk-Handregler für DCC?
Erstellt im Forum Digital von - 3
- 1862
- Letzter Beitrag von
SpaceRambler
08.10.2010
- Welchen Funk-Handregler für DCC?
-
- MP3 Decoder / DCC als Funk
Erstellt im Forum Digital von - 7
- 2129
- Letzter Beitrag von
speedy200
05.04.2006
- MP3 Decoder / DCC als Funk
