
Hallo zusammen,
heute möchte ich mein neues Bauprojekt vorstellen. Tipps, Tricks und Ratschläge immer willkommen :-)
Idee und wo sie herkommt:
Wir haben gerade ein Nebenprojekt mit dem Thema Smart Home und wie das so beim Mittagessen mit Ingenieurskollegen ist, fängt man an, das Thema ein wenig weiterzuspinnen...
Alles wird heute per App gesteuert, Licht, Sound, Küche usw. Auch der Rasen wird auf Wunsch automatisch gemäht. Was aber wenn die Rasenfläche richtig groß wird? Kann man so einen Aufsitzrasenmäher umrüsten und ins Smart Home mit einbinden? Klar geht das! Und da einer der Kollegen ein Fan von Baumaschinen- Landwirtschafts- und sonstigen Simulatoren ist, kam die Idee auf, ob man das Rasenmähen ferngesteuert vom PC aus machen könnte, und ob es vielleicht sogar Leute gibt, die freiwillig deinen Rasen mähen, solange sie das vom heimischen PC aus machen können. :-)
Was aber, wenn der Spieler mit deinem Rasenmäher abhaut, weil das Geofencing nicht funktioniert? Also erstmal kleiner und mit Begrenzung. Mit einer Modelleisenbahn hat man vorgegebene Bahnen und keiner kann mit dem Zug flüchten.
Als ich dann über Stummis Kellerbahnprojekt gestolpert bin, war die Idee klar:
Eine Rasenteppichbahn die jeder nach Anmeldung übers Internet steuern kann
Ein kurzer Kellerbesuch (Mobile Station 2 nicht im Bild):
danach einer beim OBI:
Der Unterbau ist aus zwei 12er OSB-Platten (205x62,5cm) und 6 Dachlatten, sowie 2 einfachen Böcken zusammengeschraubt.
Der Kunstrasen ist der günstigste, den sie da hatten für 7,95€/m²
Die Steuerung erfolgt über einen Raspberry Pi (Momentan ein 1er, weil die neueren momentan nur für richtig teuer Geld zu haben sind) und CAN2UDP von Lely mit den Installationstipps von Gerd, Stefan Krauß und weiteren hier im Forum und Außerhalb
Weitere Aufbaubilder und Fortschrittsberichte folgen.
Fröhliches Basteln
Haldamir
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
Rasenteppichbahn ferngesteuert übers Internet
![]() #1 von
Haldamir
, 18.03.2023 18:37
#1 von
Haldamir
, 18.03.2023 18:37
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital

RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #2 von
Anth0lzer
, 18.03.2023 20:29
#2 von
Anth0lzer
, 18.03.2023 20:29
Servus Haldamir,
sehr interessanter Ansatz mit der Steuerung übers Internet.
Auf das Ergebnis bin ich gespannt, lustig wirds garantiert.
Grüße
Hubert
Meine Teppichbahn: viewtopic.php?f=168&t=179074
- Anth0lzer
- CityNightLine (CNL)
-
Beiträge: 1.629 Registriert am: 12.02.2020 Gleise Roco Line Spurweite H0 Steuerung Roco Z21 Stromart Digital

RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #3 von
Haldamir
, 18.03.2023 23:36
#3 von
Haldamir
, 18.03.2023 23:36
spät ist's geworden, aber ihr kennt das ja, wenn man einmal dran ist...
Hier der erste Entwurf für den Gleisplan. Stummis Idee mit dem Rasenteppich ist einfach nur geil!
Die Hardware mit Raspi am zweiten Anschluss der Gleisbox über CAN-Dongle, sowie Anschlusskabel für einen S88 AC. Ich hoffe ich brauche keinen S88-Link. Die Aufgabe soll auch der RasPi erledigen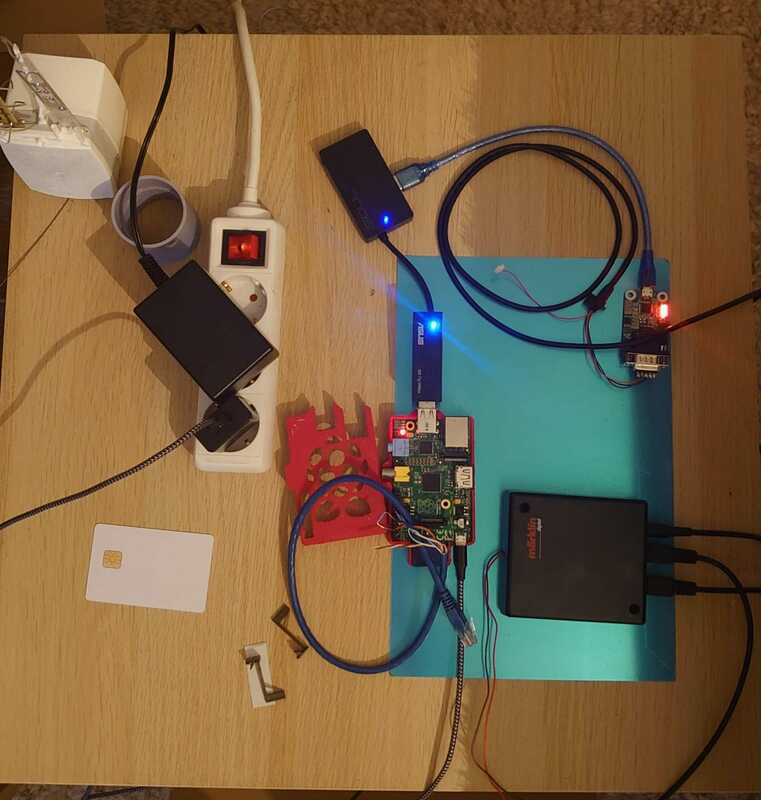
Morgen geht's weiter.
N8 zusammen
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #4 von
fbstr
, 19.03.2023 00:42
#4 von
fbstr
, 19.03.2023 00:42
Da muß ich doch mal einen Marker setzen. Hört sich sehr interessant an. 
Gruss
Frank
---------------------------------------------------------------------------------------------------------------------
MobaLedLib Wiki
Projekt "Bahnpark Augsburg"
Stummitreff BB: jeden 3. Freitag im Monat im Haus Sommerhof in Sindelfingen
- fbstr
- Metropolitan (MET)
-
Beiträge: 2.541 Registriert am: 28.08.2016 Ort: Stuttgart Gleise Peco Code 75, Trix C Spurweite H0, H0e Steuerung YD7001, MobaLedLib, MirZ21, Lenz LZV100 Stromart DC, Digital

RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #5 von
Haldamir
, 19.03.2023 10:49
#5 von
Haldamir
, 19.03.2023 10:49
Heute geht es an die Verknüpfung der Gleisbox mit dem Raspi:
Seit der Mobile Station 2 wird als Steuerprotokoll zwischen der Gleisbox, MS2 und CS2 das CAN-Protokoll benutzt. Daher ist die Steuerung über Windows oder Linux sehr viel einfacher geworden.
Der CAN-Dongle ist von Amazon. da gibt es verschiedenste Varianten mit und ohne galvanische Trennung, oder man macht es ganz einfach und bastelt oder kauft sich eine Platine für einen MCP2515 CAN-Transceiver.
Da der Rundstecker für die Gleisbox schwer zu bekommen ist, habe ich zum Anschluss ein original-Ersatzkabel E146781für die MS2 benutzt. Die Steckerbelegung ist z.B. bei Stefan Krauß zu finden. Braun=CAN_L, Orange=CAN_H, Schwarz=GND (Rot=+ wird nicht benutzt). Am 9-pol Stecker: Pin_2=CAN_L, PIN_3=GND, Pin_7=CAN_H
Einrichtung des PI nach dieser Anleitung. Damit tut der Raspi so, ale wäre er eine CS2.
Wer eine CS2 besitzt, kann sich einen Teil des Weges sparen, da die CS2 einen Netzwerkanschluss besitzt, über den die Übersetzung von CAN zum Netzwerk über UDP direkt erfolgt.
Das CAN-Protokoll für die CS2 ist hier zu finden. Das Problem hierbei: das Protokoll ist nicht sehr gut strukturiert. Ich benutze CAN beruflich bei KFZ und Testständen, da werden die 8 Byte (meistens) schön getrennt oder in Gruppen für die codierung der Daten benutzt. Märklin teilt leider seine Befehle nicht in 8er-Gruppen sondern Bitweise. Daher teilen sich die meisten Befehle zwischen mehreren Bytes auf, was die ganze Sache aufwändiger macht.
Also wird erstmal an der Gleisbox gelauscht und die Befehle nachgebaut ohne Rücksicht auf Slave-Anmeldung und Verifizierung der Daten.
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #6 von
Haldamir
, 19.03.2023 11:19
#6 von
Haldamir
, 19.03.2023 11:19
lauschen per candump und testen der Steuer-Befehle mit cansend
für die folgende Beschreibung sind grundlegende Kenntnisse in Linux und der Aufbau des CAN-Bus Systems hilfreich.
alle paar Sekunden schickt die Gleisbox bzw. die MS2 ihren Status:
2
3
4
5
6
7
8
9
10
11
x@bahnpi:~ $ candump can0 -a
can0 0030C310 [0] ''
can0 0031832A [8] 47 46 6D C4 01 2F 00 11 'GFm../..'
can0 0030C310 [0] ''
can0 0031832A [8] 47 46 6D C4 01 2F 00 11 'GFm../..'
can0 0030C310 [0] ''
can0 0031832A [8] 47 46 6D C4 01 2F 00 11 'GFm../..'
can0 0030C310 [0] ''
can0 0031832A [8] 47 46 6D C4 01 2F 00 11 'GFm../..'
Wie man sieht, wird ein 23bit Identifier benutzt (ID oder Adresse genannt, z.B. hier 0031832A). Der ist leider auch Bitweise codiert und man kann nicht auf den ersten Blick sehen, wer was sendet. Alle Werte sind Hexadezimal. Danach kommt eine Information, wie viele Datenbytes die Nachricht enthält (hier z.B. [8]) dann kommt die entsprechende Anzahl Datenbytes in hexadezimaler form codiert und kann also Werte zwischen 0 und 255 darstellen. Sollen größere Werte benutzt werden, kann man 2 Bytes zusammenziehen. Weiter unten z.B. die Lok-Geschwindigkeit von Hexadezimal 0000 bis 03FF was nach dezimal umgerechnet einem Wert von 0 bis 1023 entspricht. Den hexadezimalen Zahlen wird oft zur Verdeutlichung ein 0x und den dezimalen Zahlen ein 0d vorangestellt aber nicht mit übertragen.
Es wird immer der Befehl auf einer bestimmten CAN-ID geschickt und die Rückmeldung kommt auf einer anderen ID. Der Nachrichteninhalt kann maximal 8 Bytes lang sein. Die Antwort beinhaltet immer die Nachricht der Anfrage und je nach Befehl auch noch im Anhang den angefragten Wert wie z.B. Spannung, Strom, Temperatur... und hoffentlich für die Zukunft auch Zustände von Loks, Weichen, usw.
Weiche 1 mit der MS2 schalten:
2
3
4
5
6
can0 0016C310 [6] 00 00 30 00 01 01 '..0...'
can0 0017832A [6] 00 00 30 00 01 01 '..0...'
can0 0016C310 [6] 00 00 30 00 01 00 '..0...'
can0 0017832A [6] 00 00 30 00 01 00 '..0...'
Gesendet wird:
2
3
can0 0016C310 [6] 00 00 30 00 01 01
Die Rückmeldung, ob der Befehl angekommen ist und ausgeführt wurde:
2
3
can0 0017832A [6] 00 00 30 00 01 01
Byte 3: "30" ist vermutlich die Adresse des Pi oder der MS2. Das kann man sich aus dem Märklin CAN-Protokoll (link oben) rausrechen.
Byte 4: "00" ist die Weichennummer. Auf dem Bus wird ab Null gezählt. Das ist also die Weiche mit der Nummer 1 am Weichendecoder.
Byte 5: "01" ist Weiche grün, "00" ist Weiche rot
Byte 6: "01" Strom an" und ein paar Milisekunden später nochmal das ganze, diesmal "00" für Strom aus
Wichtig hier: Werden hier nicht 6 sondern 7 oder 8 Bytes gesendet, wird der Befehl nicht akzeptiert, auch wenn die letzten Bytes 0 sind
Sendetest
2
3
4
5
6
7
@bahnpi:~ $ cansend can0 0016c310#00.00.30.00.01.01
@bahnpi:~ $ cansend can0 0016c310#00.00.30.00.01.00
@bahnpi:~ $ cansend can0 0016c310#00.00.30.00.00.01
@bahnpi:~ $ cansend can0 0016c310#00.00.30.00.00.00
Damit lässt sich die Weiche 1 per Raspi steuern. Die Antwort auf dem Bus, über candump mitgelauscht, ist die selbe, wie oben beim senden von der MS2.
Alle weiteren Tests laufen nach dem selben Schema:
- Befehl mit der MS2 senden
- Befehl und Antwort am Raspi über candump mitprotokollieren
- Test am raspi mit dem Befehl cansend, ob das selbe passiert.
Loks steuern
Lok 1 (DCC Adresse 60 Mäuseklavier) per MS2 steuern und am Bus lauschen:
Fahrstufe einstellen
Befehl und Rückmeldung:
2
3
4
can0 0008C310 [6] 00 00 00 3C 01 E1 '...<..'
can0 0009832A [6] 00 00 00 3C 01 E1 '...<..'
Lok 2 (DCC Adresse 15, ESU LokPilot Basic) per MS2 steuern und am Bus lauschen:
Befehl und Rückmeldung:
2
3
4
can0 0008C310 [6] 00 00 C0 0F 01 1B '......'
can0 0009832A [6] 00 00 C0 0F 01 1B '......'
Byte 3 und 4 scheinen die Lok-Adresse zu beinhalten.
Lok 1 mit dem alten Decoder hat die Adresse dezimal 60 = Hexadezimal 00 3C
Lok 2 kann lange Adressen. Da muss wohl irgendwie umgerechnet werden. Was die C0 bedeutet weiß ich noch nicht. Dezimal 15 = Hexadezimal 0F passt wieder auf die Lok-Adresse
Byte 5 und 6 beinhalten die Fahrstufe von "00 00" bis "03 FF" Hier im Beispiel 0x01E1 also ca. 47% bzw. 0x011B also ca. 28% der Maximalgeschwindigkeit.
Richtung einstellen
Befehl und Rückmeldung der Lok 2 an der MS2:
Lok vorwärts:
2
3
4
5
6
can0 0000C310 [5] 00 00 C0 0F 03 '.....'
can0 0001832A [5] 00 00 C0 0F 03 '.....'
can0 000AC310 [5] 00 00 C0 0F 01 '.....'
can0 000B832A [5] 00 00 C0 0F 01 '.....'
Lok rückwärts:
2
3
4
5
6
can0 0000C310 [5] 00 00 C0 0F 03 '.....'
can0 0001832A [5] 00 00 C0 0F 03 '.....'
can0 000AC310 [5] 00 00 C0 0F 02 '.....'
can0 000B832A [5] 00 00 C0 0F 02 '.....'
Wozu der Befehl mit der 03 am Ende ist, weiß ich noch nicht. es reicht auch der zweite Befehl für die Richtungswahl:
Bytes 3 und 4: "C0 0F" ist wieder die Lok-Adresse
Byte 5: "01" vorwärts, "02" rückwärts
F-Tasten
Taste 1:
2
3
4
5
6
can0 000CC310 [6] 00 00 C0 0F 00 01 '......'
can0 000D832A [6] 00 00 C0 0F 00 01 '......'
can0 000CC310 [6] 00 00 C0 0F 00 00 '......'
can0 000D832A [6] 00 00 C0 0F 00 00 '......'
Bytes 3 und 4: "C0 0F" ist wieder die Lok-Adresse
Byte 5: Tastennummer, wieder bei 0 beginnend für Taste 1
Byte 6: 01=an, 00=aus
Stopp Kommando
Ganz wichtig der Nothalt. Auf der MS2 wurde der Nothalt gedrückt und wieder aufgehoben:
2
3
4
5
6
7
8
9
10
can0 0000C310 [5] 00 00 00 00 00 '.....'
can0 0001832A [5] 00 00 00 00 00 '.....'
can0 0000C310 [7] 00 00 00 00 09 00 02 '.......'
can0 0000C310 [6] 00 00 00 00 08 07 '......'
can0 0001832A [7] 00 00 00 00 09 00 02 '.......'
can0 0000C310 [5] 00 00 00 00 01 '.....'
can0 0001832A [6] 00 00 00 00 08 07 '......'
can0 0001832A [5] 00 00 00 00 01 '.....'
Es scheinen wieder zusätzliche Kontrollkommandos gesendet zu werden, wie auch bei den Magnetartikeln.
Für die reine Funktion ohne zusätzliche Kontrolle reicht auch
"Stop" mit Rückmeldung
2
3
4
can0 0000C310 [5] 00 00 00 00 00 '.....'
can0 0001832A [5] 00 00 00 00 00 '.....'
"Stop" aufheben:
2
3
4
can0 0000C310 [5] 00 00 00 00 01 '.....'
can0 0001832A [5] 00 00 00 00 01 '.....'
Abfrage Strom und Spannung
Strom 0,3A bis 0,4A schwankend:
2
3
4
can0 0000C310 [6] 47 46 6D C4 0B 01 'GFm...'
can0 0001832A [8] 47 46 6D C4 0B 01 01 64 'GFm....d'
Spannung 18,4V (bei Stop):
2
3
4
can0 0000C310 [6] 47 46 6D C4 0B 03 'GFm...'
can0 0001832A [8] 47 46 6D C4 0B 03 06 16 'GFm.....'
Temperatur 31°C:
2
3
4
can0 0000C310 [6] 47 46 6D C4 0B 04 'GFm...'
can0 0001832A [8] 47 46 6D C4 0B 04 00 56 'GFm....V'
Die Codierung ist noch unklar. Auf jeden Fall sind die letzten 2 Bytes jeweils die Antwort
Byte 6 ist die Unterscheidung für Strom (01) und Spannung (03) bzw. Temperatur (04)
Mögliche Interpretation
Strom=Wert/800 => 0x0164=0d356 => 356/800 entspricht dann 0,445A (das kommt hin)
Spannung=Wert/80 => 0x0616=0d1558 => 1558/80 entspricht dann 19,475V ??? Vielleicht ein Offset von 1 ????
Temperatur=Wert/ => 0x0056=0d86 => möglicherweise ein Offset von 55
Für erste Tests für die Steuerung über Internet sollte das ausreichen.
Jetzt geht es ans Programmieren.
Welche Sprache für die Steuer-Skripte soll benutzt werden?
- php
- python
- c
- ...
Die Webseite wird erstmal mit statischem html angelegt. Das ist einfach und geht schnell.
Ich wünsche einen schönen Sonntag
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #7 von
Jettaheizer
, 19.03.2023 17:09
#7 von
Jettaheizer
, 19.03.2023 17:09
Hallo Haldamir,
ich finde dein Projekt toll und bin sicher nicht der einzige, der das gerne testen möchte, wenn es soweit ist, aber ich muß zugeben, daß ich bei deinem letzten Post nur noch Bahnhof verstanden habe.
Ich wollte mich selber schon in die Programmierung eines Arduino einarbeiten, aber das sind für mich böhmische Dörfer. Seit Basic 1.0 hat sich halt doch so einiges geändert...
Trotzdem bleibe ich hier dran!
Gruß,
Franz
Sei einfach Du selbst!
Schon ein einfacher Buchstabendreher kann den ganzen Satz urinieren...
- Jettaheizer
- InterRegio (IR)
-
Beiträge: 160 Registriert am: 14.05.2022 Ort: Hennef Spurweite H0 Stromart AC, Analog
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #8 von
Haldamir
, 19.03.2023 22:38
#8 von
Haldamir
, 19.03.2023 22:38
Hallo Franz,
da stimme ich dir zu. Das Digitalzeugs ist nicht ganz einfach. Ich hatte erst überlegt, das Projekt im digitalen Teil des Forums vorzustellen, wollte es aber, da es eine Art Teppichbahn bleiben wird, lieber hier vorstellen
Gruß
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #9 von
Haldamir
, 19.03.2023 22:56
#9 von
Haldamir
, 19.03.2023 22:56
Der Vollständigkeit halber, auch wenn es für das Thema der Idee zweitrangig ist:
Das Rollende Material:
Lok 1 ist eine auf digital (Delta Digital Mäuseklavier) umgerüstete BR38 3099
Lok 2 ist eine auf digital (ESU LokPilot Basic) umgerüstete BR89 30000
Die Donnerbüchsen sind wohl allseits bekannt und brauchen keine extra Erwähnung
Gruß und gute Nacht
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #10 von
Haldamir
, 25.03.2023 16:11
#10 von
Haldamir
, 25.03.2023 16:11
Hallo zusammen,
erster Test, ob meine Idee überhaupt funktioniert mit primitiven Layout programmiert in php. Dazu läuft auf dem Raspberry ein Webserver mit apache und php. Unter /var/www/html/ kann man seine Programme ablegen, die dann im Browser über die lokale IP aufgerufen werden können: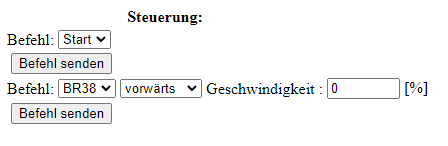
Dahinter laufen zwei kleine Programme. Das eine stellt die Oberfläche bereit (bahnpi.php), das andere verarbeitet die Daten und schickt sie an die Gleisbox (steuerung.php). Hier sind Ratschläge, Tipps und Tricks beim Programmieren willkommen.
Es kann Start/Stop ausgeführt werden und die beiden Loks können auf eine beliebige Geschwindigkeit zwischen 0-100% gesetzt werden
Das ganze läuft noch lokal ohne alle Sicherheit. Nächste Schritte:
- Weichensteuerung
- Livestream der Anlage und Führerhaus-Kameras
- Das System betriebssicher machen mit Rückmeldungen usw.
Ich wünsche fröhliches Basteln
Haldamir
- Dateianlage:
-
Sie haben nicht die nötigen Rechte, um die angehängten Dateien zu sehen
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #11 von
Haldamir
, 01.04.2023 18:41
#11 von
Haldamir
, 01.04.2023 18:41
Auf der Suche nach Steuerungssoftware und Gleisbahnsoftware bin ich unter anderem auf das Modellbahn Studio gestoßen, das sich meiner Meinung nach am besten von allen freien Tools bedienen lässt. Sogar einen 3d-Modus gibt es, mit dem man die Bahn simuliert fahren lassen kann:
Zur Steuerung über's Internet bin ich gerade am ausknobeln, ob man auch fertige Software, wie Win-Digipet oder Rocrail benutzen kann und nur die Ports und Adressen passend umbiegen muss. Rocrail lässt ja anscheinend auch Videoübertragungen zu. Dann läge die Herausforderung mehr in Richtung Router-Programmierung auf dem RasPi. Die eigene Homepage würde dann nur dazu dienen, eine Art Anmeldefunktion bereitzustellen.
Fröhliches Basteln
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #12 von
Haldamir
, 06.04.2023 23:50
#12 von
Haldamir
, 06.04.2023 23:50
Erster Test für das zu verwendende Videosystem
Momentan bin ich am testen, was für eine Art der Videoübertragung geeignet ist.
Am Gleisbild hat sich ein bisschen was geändert und es steht mehr rollende Material auf der Strecke.
Dieses System von aliexpress wollte ich eigentlich in die Lok einbauen, das ist aber ein bisschen größer, als gedacht und die Qualität nicht so überragend. Also erst mal ein Test, ob sie als Übersichts-Kamera geeignet ist:
Ein vernünftiges Capture-System braucht es auch noch statt der Demo-Version von Bandicam
Fröhliches Basteln wünscht
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #13 von
Haldamir
, 14.04.2023 22:07
#13 von
Haldamir
, 14.04.2023 22:07
Hallo zusammen,
nachdem das erste FPV System nicht so überzeugend zu sein schien, hab ich beim Chinesen ein kleineres System besorgt. Das hat nicht so viel Reichweite, ist dafür aber eine ganze Ecke kleiner. Das Ganze auf eine BR 212 geklebt und eine Runde gedreht:
(Ton besser ausmachen)
Fröhliches Basteln
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #14 von
KleTho
, 14.04.2023 22:38
#14 von
KleTho
, 14.04.2023 22:38
Danke für die Warnung 
Hättest Du nur vor das Video stellen sollen 
Ansonsten super.
Cool wäre, wenn die Kamera so klein wäre, dass man sie im Führerstand unterbringen könnte.
Die Elektronik könnte man dann ja in einen Wagen unterbringen.
Mit herzlichen Grüßen aus Lemvig,
Thomas
Mein Thread über meine Parkettbahn in Schwabing, jetzt mit Inhaltsverzeichnis
- KleTho
- Metropolitan (MET)
-
Beiträge: 3.413 Registriert am: 24.07.2014 Ort: Midtjylland Gleise C-Gleis Spurweite H0 Steuerung CS2 und MS2 Stromart AC, Digital, Analog

RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #15 von
Haldamir
, 15.04.2023 18:41
#15 von
Haldamir
, 15.04.2023 18:41
Hi KleTho,
jop. Das Mit dem Führerstand wollt ich eigentlich auch, aber dazu ist selbst diese Kamera noch zu groß. Zumindest für die BR 38, die ich eigentlich geplant hatte.
Wobei das auch seinen Reiz hat. Nur die Qualität könnte besser sein. Vielleicht noch eine LED in den Führerstand, damit man den Kessel sieht...
Das ganze ist noch per Akku versorgt, aber ein kleiner StepDown Wandler sollte noch Platz in der Lok haben

Der gelbe Kunststoff ist ein Anycubic EC Harz (geruchsarm und "Umweltfreundlich" aus Soja). Einmal als Halterung für die Kamera und zum anderen als Tendergehäuse, weil ich für diese Lok keinen original-Tender habe. Leider gibt es das gelbe Harz nur ganz selten mal weil es wohl eine Sonderfarbe ist. Das läuft aber auf meinem Phrozen Sonic Mini am besten. Deswegen verwende ich es lieber, als das schwarze.
Gibt es eine Lok, in der mehr Platz ist?
In der 212 ist kein Platz im Führerhaus, weil da der Motor ist.
Fröhliches Basteln
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #16 von
Pirat-Kapitan
, 18.04.2023 21:34
#16 von
Pirat-Kapitan
, 18.04.2023 21:34
Zitat von Haldamir im Beitrag #11
Zur Steuerung über's Internet bin ich gerade am ausknobeln, ob man auch fertige Software, wie Win-Digipet oder Rocrail benutzen kann und nur die Ports und Adressen passend umbiegen muss. Rocrail lässt ja anscheinend auch Videoübertragungen zu. Dann läge die Herausforderung mehr in Richtung Router-Programmierung auf dem RasPi. Die eigene Homepage würde dann nur dazu dienen, eine Art Anmeldefunktion bereitzustellen.
Haldamir
Moin,
ich fahre Rocrail auf RasPi. Unabhängig ob Internetzugang oder nicht (mein Gartenbahn-Netz hat keinen, H0m hat einen), bietet der RasPi einen mit dem Betriebssystem mitgelieferten VNC-Server. Den entsprechenden VNC-Client habe ich für RasPi und Windows 10. Damit muss nur noch eine Standardverbindung von draußen auf das heimische Netzwerk eingerichtet werden / vorhanden sein.
Das Camerabild kann man auch in die Rocraildarstellung integrieren, so dass die Lokführersicht mit übermittelt wird. Streckenkunde sollte allerdings vorhanden sein, sonst wird es manchmal problematisch.
Schöne Grüße
Johannes
Spur G im Garten, H0m im Hause. Lenz LZV100 mit Rocrail auf RasPi, Manhart-Funky und RocoWLM.
- Pirat-Kapitan
- CityNightLine (CNL)
-
Beiträge: 1.595 Registriert am: 13.05.2018 Ort: Bergisches Land Gleise Edelstahl / TT-Bettungsgleis Tillig Spurweite H0, H0m, N, G Steuerung Lenz LZV100 Stromart Digital

RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #17 von
Haldamir
, 19.04.2023 18:40
#17 von
Haldamir
, 19.04.2023 18:40
Zitat von Pirat-Kapitan im Beitrag #16
ich fahre Rocrail auf RasPi. Unabhängig ob Internetzugang oder nicht (mein Gartenbahn-Netz hat keinen, H0m hat einen), bietet der RasPi einen mit dem Betriebssystem mitgelieferten VNC-Server. Den entsprechenden VNC-Client habe ich für RasPi und Windows 10. Damit muss nur noch eine Standardverbindung von draußen auf das heimische Netzwerk eingerichtet werden / vorhanden sein.
Hi Johannes,
Danke für den Hinweis, dass mein Gedanke prinzipiell so funktionieren sollte.
Die Verbindung nach draußen lässt sich über einen kleinen Server mit öffentlicher IP realisieren, oder wenn man beim heimischen Provider entsprechend mehr Geld bezahlt und eine feste IPv4 Adresse bekommt.
Aber so eine Lösung wollte ich eigentlich vermeiden. Da die Anlage evtl. mal für jedermann zugänglich sein soll, wollte ich eigentlich nicht die komplette Oberfläche über VNC zur Verfügung stellen.
Fröhliches Basteln
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #18 von
Haldamir
, 23.04.2023 14:06
#18 von
Haldamir
, 23.04.2023 14:06
Kurzer Ausflug: Spur Z Tischbahn
Hallo zusammen,
kurzer Ausflug auf den Tisch:
Märklin Mini Club Spur Z Tischbahnen macht wohl keiner? Zu fummelig mit dem Märklin Gleis wenn es doch Rokuhan Gleise gibt?
Ich hab's trotzdem mal probiert. Die größte Herausforderung auf dem kleinen Bauraum: Schafft die BR89 aus dem Starterpack die 10% Steigung, die eigentlich viel zu viel sind? 

Fröhliches Basteln
Haldamir
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #19 von
DL1NFI
, 17.03.2024 10:59
#19 von
DL1NFI
, 17.03.2024 10:59
Hallo, das ganze Projekt klingt ja sehr interessant, aber es scheint eingeschlafen zu sein oder geht es weiter?
- DL1NFI
- S-Bahn (S)
-
Beiträge: 16 Registriert am: 01.01.2022 Ort: Hilpoltstein Spurweite H0, N Stromart AC, DC, Digital
RE: Rasenteppichbahn ferngesteuert übers Internet
![]() #20 von
Haldamir
, 22.04.2024 20:58
#20 von
Haldamir
, 22.04.2024 20:58
Hi DL1
Ja, das Projekt ist on Hold, da der verwendete Raspberry Pi eins einfach zu langsam ist. Daher habe ich gewartet, bis es den neuen fünfer zu annehmbaren Preisen gibt.
Leider ist jetzt das Problem, dass beim fünfer RasPi die Treiber und Zuweisungen für die GPIO Schnittstelle geändert wurde und jetzt die Software PiCanS88 nicht mehr funktioniert.
Für eine neue Lösung oder selbst die Programme umstricken habe ich im Moment leider keine Zeit 
- Haldamir
- S-Bahn (S)
-
Beiträge: 17 Registriert am: 15.02.2023 Gleise Märklin C-Gleis Spurweite H0 Stromart AC, Digital
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Verbindung zu Internet TC10/Z21
Erstellt im Forum Digital von bernd46 - 25
- 1159
- Letzter Beitrag von
Fraenki

24.11.2022
- Verbindung zu Internet TC10/Z21
-
- Software über das Internet freischalten
Erstellt im Forum Software und Hardware von sbuehne - 125
- 13352
- Letzter Beitrag von
UP4001
11.07.2023
- Software über das Internet freischalten
-
- Wie kann ich den ferngesteuerten WIKING CONTROL 87 Bus öffnen zum Akkuwechsel?
Erstellt im Forum Modellautos und Car-System von Karl87 - 2
- 1322
- Letzter Beitrag von
Karl87
25.06.2021
- Wie kann ich den ferngesteuerten WIKING CONTROL 87 Bus öffnen zum Akkuwechsel?
-
- Ferngesteuertes Tuk Tuk (1:87) mit Abstandsregelung für Car System
Erstellt im Forum Modellautos und Car-System von - 27
- 22043
- Letzter Beitrag von
El Lobo
22.09.2020
- Ferngesteuertes Tuk Tuk (1:87) mit Abstandsregelung für Car System
-
- Kriege kein Internet über den TP-Link an den PC
Erstellt im Forum Software und Hardware von - 3
- 1684
- Letzter Beitrag von
rmayergfx
23.12.2016
- Kriege kein Internet über den TP-Link an den PC
-
- Ferngesteuerte Wiking-Autos
Erstellt im Forum Spur H0 von - 39
- 10941
- Letzter Beitrag von
Peter Müller
22.03.2009
- Ferngesteuerte Wiking-Autos
-
- ECOS Verbindung ins Internet
Erstellt im Forum Digital von - 24
- 8128
- Letzter Beitrag von
30.09.2006
- ECOS Verbindung ins Internet
