
Hallo zusammen,
Inspiriert von den Basteleien rund um den Märklin CAN Bus habe ich angefangen selber etwas zu entwickeln.
Nachdem ich nebst der CS3 von Märklin auch die Gleisbox von Gerd einsetze, war es naheliegend das ich gerne weitere Komponenten einsetzen möchte da mir das Entwickeln und basteln Spass macht. Ich habe bisher schon einige Sachen mit dem Arduino programmiert und deshalb war es naheliegend das ich ebenfalls diese Plattform nutzen möchte.
Die Hardware ist modular aufgebaut, für einen kompletten CAN Knoten benötigt man jeweils eine Basisplatine sowie den Funktionsaufsatz.
Auf der Basisplatine ist ein Atmega328p sowie die CAN Bauteile untergebracht, über zwei RJ45 ist die Kommunikation mit den anderen Modulen gewährleistet, dabei kommt dieselbe Belegung wie bei der Gleisbox von Gerd oder von den MaeCAN Komponenten zum Zuge. Das Platinen passen in ein Gehäuse der Firma Strapubox, somit ist auch das ganze am Ende optisch ansprechend und wirkt ein wenig professioneller.
Momentan habe ich zwei verschiedene Funktionsaufsätze entwickelt:
Weichen-/ Funktionsdecoder
Eine Platine um acht Funktionen oder vier Weichen zu schalten. Mittels Lötbrücken können die angeschlossenen Zubehörartikel wahlweise über den CAN-Bus oder eine externe Spannungsquelle versorgt werden. Bei externer Spannungsversorgung ist diese über Optokoppler von der restlichen Schaltung getrennt.
Rückmelder
Eine Platine um acht Gleisabschnitte zu überwachen. Dabei kommt die Erkennung über Stromsensoren zum Einsatz.
Die Software habe ich aus dem MaeCAN Projekt von Maxi übernommen und ein wenig weiterentwickelt. Natürlich ist die Hardware auch mit dem Originalprojekt lauffähig, nutzt es doch im Grunde dieselbe Hardwaregrundlage.
Der Weichendecoder funktioniert bereits zur vollsten Zufriedenheit, vier Stück sind in meinem Bahnhof eingebaut und steuern die Weichenantriebe von MTB. Der Rückmelder ist momentan noch in der Entwicklung, die Rückmeldungen auf dem CAN Bus funktionieren bereits zufriedenstellend, nur die Auswertung bei Kontaktschwierigkeiten muss noch verbessert werden.
Gerne würde ich die Entwicklungen mit euch teilen, besteht Interesse an den Schaltplänen und der Software?
Dann würde ich diese gerne über GitHub für euch zugänglich machen.
Liebe Grüsse
Patrik
 Stummis Modellbahnforum
Stummis Modellbahnforumwww.stummiforum.de
RE: Elektronik für den Märklin CAN Bus
![]() #1 von
PatrikL
, 07.03.2021 23:19
#1 von
PatrikL
, 07.03.2021 23:19
- PatrikL
- S-Bahn (S)
-
Beiträge: 19 Registriert am: 05.08.2019 Spurweite N

RE: Elektronik für den Märklin CAN Bus
![]() #2 von
bertr2d2
, 08.03.2021 10:26
#2 von
bertr2d2
, 08.03.2021 10:26
Hallo Patrik,
Respekt, sieht sehr professionell aus  Die Idee mit dem modularen Aufbau gefällt mir sehr gut.
Die Idee mit dem modularen Aufbau gefällt mir sehr gut.
Zitat
Gerne würde ich die Entwicklungen mit euch teilen, besteht Interesse an den Schaltplänen und der Software?
Dann würde ich diese gerne über GitHub für euch zugänglich machen.
Sehr gerne würde ich mir die Sachen anschauen. Ein Frage habe ich gleich: Du nutzt einen Atmega zusammen mit einem MCP2515. Warum nicht gleich eine MCU mit integriertem CAN Controller ?
Gruß
Gerd
Smallest Rocrail Server Ever II ist jetzt Smallest Railroad Server Ever II
SRSEII -> SRSEII (Raider heisst jetzt Twix, sonst ändert sich nix  )
)
- bertr2d2
- CityNightLine (CNL)
-
Beiträge: 1.539 Registriert am: 09.10.2012 Spurweite H0 Stromart Digital

RE: Elektronik für den Märklin CAN Bus
![]() #3 von
vikr
, 08.03.2021 11:39
#3 von
vikr
, 08.03.2021 11:39
Hallo Gerd,
Zitat
Ein Frage habe ich gleich: Du nutzt einen Atmega zusammen mit einem MCP2515. Warum nicht gleich eine MCU mit integriertem CAN Controller ?
Gerd
Ist das nicht der günstige klassische Weg, mit dem Stefan Krauss
http://www.skrauss.de/modellbahn/gboxcan.html
und Jörg Pleumann
[url]http://www.skrauss.de/modellbahn/gbox_projekte.html
[/url]
auch erstmal gestartet sind?
MfG
vik
im Übrigen - Märklin am liebsten ohne Pukos, z.B. als Trix 
- vikr
- ICE-Sprinter
-
Beiträge: 6.261 Registriert am: 23.10.2011 Gleise M, C u. K. Spurweite H0, N Stromart Digital, Analog
RE: Elektronik für den Märklin CAN Bus
![]() #4 von
PatrikL
, 09.03.2021 23:01
#4 von
PatrikL
, 09.03.2021 23:01
Hallo Zusammen,
Danke für eure Antworten.
Der Grund warum ich auf den Mega 328P und die Kombi aus MCP2551 und 2515 gesetzt habe war die Tatsache das bereits einige Projekte mit dieser Konstellation vorhanden waren.
Ich bastle lieber Hard- als Software  Deshalb war es naheliegend eine Grundlage zu erschaffen die möglichst breit eingesetzt werden kann, eine Programmierung mithilfe der Rauiluino Bibliothek sollte ebenso funktionieren wie die Bibliothek von MaeCan.
Deshalb war es naheliegend eine Grundlage zu erschaffen die möglichst breit eingesetzt werden kann, eine Programmierung mithilfe der Rauiluino Bibliothek sollte ebenso funktionieren wie die Bibliothek von MaeCan.
Zukünftige Erweiterungen:
- Aufsatz für Kehrschleifenumschaltung
- Unterstützung ATMEGA4809
- Implementation DS1820 zur einfacheren Generierung der UID / Seriennummer
Auf meinem GitHub habe ich die neusten Projektdateien abgelegt:
https://github.com/N-Scale/CAN/tree/master/Hardware
Ich erstelle die Platinen jeweils mit eagle. Die Gerber Files sind für JLCPCB gedacht.
Auch Reichelt Warenkörbe wären auf Wunsch verfügbar.
Bei Verbesserungsvorschlägen dürft ihr mich gerne kontaktieren
Grüsse
Patrik
- PatrikL
- S-Bahn (S)
-
Beiträge: 19 Registriert am: 05.08.2019 Spurweite N
RE: Elektronik für den Märklin CAN Bus
![]() #5 von
Ixam97
, 12.03.2021 15:42
#5 von
Ixam97
, 12.03.2021 15:42
Hallo Patrik,
na die Platinen kommen mir doch sehr bekannt vor 
Freut mich zu sehen, dass dein Projekt voran kommt.
Würde es dir was ausmachen, auch deine Software bei GitHub hochzuladen? Da ich ja momentan auch an einem Belegtmelder arbeite (allerdings x32 statt x8  ) würde mich interessieren, wie du das so umgesetzt hast. Bei meinem habe ich auch schon eine Erkennung fehlender Gleisspannung sowie "Wackelkontackt-Debouncing" integriert, falls du noch Inspiration brauchst. Ich warne aber vor: Da findet viel Bitgeschubse statt
) würde mich interessieren, wie du das so umgesetzt hast. Bei meinem habe ich auch schon eine Erkennung fehlender Gleisspannung sowie "Wackelkontackt-Debouncing" integriert, falls du noch Inspiration brauchst. Ich warne aber vor: Da findet viel Bitgeschubse statt  .
.
Ich nehme an, dass du nach wie vor die Arduino-IDE und meine "veraltete" Bibliothek dafür benutzt? In meinem MäCAN-Reborn-Repo findest du die aktuellste Fassung davon, die ich in letzter Zeit nochmal drastisch überarbeitet habe, um die Stabilität zu verbessern (https://github.com/Ixam97/MaeCAN-Reborn/...Firmware/Common). Diese Fassung funktioniert jetzt auch mit der Arduino-IDE (auf Herz und Nieren habe ich das noch nicht getestet, aber ein einfacher "Ping-Responder" läuft  ops: ). Wenn du möchtest kannst du dir die neue Version ja mal ansehen. Ich bin dann auch gerne behilflich ggf. Anpassungen mit einzubringen oder z.B. den Bootloader auf deine Boards anzupassen, sofern da deinerseits Interesse besteht. Eine umfangreiche Dokumentation habe ich leider bisher nicht geschrieben.
ops: ). Wenn du möchtest kannst du dir die neue Version ja mal ansehen. Ich bin dann auch gerne behilflich ggf. Anpassungen mit einzubringen oder z.B. den Bootloader auf deine Boards anzupassen, sofern da deinerseits Interesse besteht. Eine umfangreiche Dokumentation habe ich leider bisher nicht geschrieben.
Viele Grüße und Clausthaler Glück Auf,
Maxi.
____________________________________________________
github.com/Ixam97
MäCAN Reborn
- Ixam97
- InterRegioExpress (IRE)
-
Beiträge: 255 Registriert am: 13.01.2014
RE: Elektronik für den Märklin CAN Bus
![]() #6 von
PatrikL
, 13.03.2021 15:30
#6 von
PatrikL
, 13.03.2021 15:30
Hallo Maxi,
Danke für dein Feedback, meine Software ist eher rudimentär, ich habe mir erlaubt dir diese per Mail zu schicken.
Danke für den Hinweis über deine neue Version, ich denke es würde Sinn machen diese zu verwenden, wenn jeder seine eigenen Bibliotheken schreibt wird es irgendwann ziemlich unübersichtlich. Und so ein generelles Projekt für den Märklin Can Bus wär doch was feines
Ich habe mir deine Cods mal angeschaut, meine Programmierkenntnisse sind was über das Arduino hinausgeht leider nur sehr rudimentär, aber ich habe in deinem Bootloader einige interessante Dinge gesehen, beispielsweise die Generierung der UID und der Serie Nummer, bisher Kämpfe ich mit Excel listen um jeden Modul jedes mal die gleiche UID und Serialnummer wiederzugeben. Das wäre super wenn man das irgendwie auch zum laufen bekäme
Meine Hardware sollte eigentlich zu deiner Busankoppler Definition passen, nutze ich doch den selben Led Ausgang (PB1), nur das ich bei allen meinen Module den Type #0x0070 verwende, das ist bei der CS3 wichtig, da die Geräte nach Typ eingeordnet werden, #0x0070 ist dabei unter "Sonstige Geräte" #0x0060 wäre ein "Gateway", andere Definition die Funktionieren müssten ausprobiert werden.
Grüsse
Patrik
- PatrikL
- S-Bahn (S)
-
Beiträge: 19 Registriert am: 05.08.2019 Spurweite N
RE: Elektronik für den Märklin CAN Bus
![]() #7 von
Ixam97
, 13.03.2021 17:20
#7 von
Ixam97
, 13.03.2021 17:20
Hallo Patrik,
ich habe MCAN heute nochmal aktualisiert. Insbesondere sind die Funktionen jetzt besser dokumentiert, zum anderen werden UID und Hash jetzt nicht mehr als Parameter an die verschiedenen Send-Funktionen übergeben. Ein einmaliges übergeben der UID beim Initialisieren genügt.
Deinen Code habe ich mir mal angesehen. Da schaudert es mir selbst vor meinem eigenen, alten Code . Das von dir angesprochene Problem mit den sich aufhängenden Controllern hatte ich auch. Das war auch der initiale Anstoßgeber, das alles nochmal neu zu machen. Ich habe auch darauf geachtet, dass weitere Controller bzw. Hardwarekonfigurationen einfach integriert werden können. Bisher hat sich der neue Code als sehr robust erwiesen. Selbst "Datenlawinen" bei Updates, bei denen 600 Frames pro Sekunde übertragen werden, werden problemlos und ohne Datenverlust abgearbeitet (sogar bei der Verwendung des seriellen Interface).
Zuletzt war mir auch die Bedienerfreundlichkeit ein Anliegen. Daher habe ich jetzt so viel wie möglich "versteckt". Nach einem ersten Blick auf deinem Code ist eine Anpassung an die neue Lib vermutlich mit einigem Aufwand verbunden, sollte sich aber grade für zukünftige Erweiterungen auszahlen.
Ich habe einfach mal ein kleines Minimalbeispiel erstellt, dass die grundlegende Verwendung der neuen Lib in der Arduino-IDE demonstriert. Um Interrupt-Funktionen und dergleichen braucht man sich nicht mehr kümmern, das macht alles die Lib
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
#include "mcan.h"
#include <avr/boot.h>
#define VERSION 0x0201 // Softwareversion
#define TYPE 0x70 // Gerätetyp
#define SERIAL_NUMBER 1 // Seriennummer
#define ITEM_NUMBER "Artikel#" // Artikelnummer, max. 8 Zeichen
#define DEVICE_NAME "Ger\u00E4tename" // Gerätename
#define UID 0x12340000 // Geräte-UID
#define ADDRESS 0x01 // Magnetartikeladresse
canFrame frame_in; // Eingehender CAN-Frame
uint16_t serial_nbr;
void setup() {
serial_nbr = (uint16_t)(boot_signature_byte_get(22) << 8) | boot_signature_byte_get(23);
mcan_init(UID + serial_nbr); // CAN-Bus mit UID initialisieren
}
void loop() {
// Überpüfen, ob CAN-Frame im Ringpuffer:
if (readCanFrame(&frame_in) == 1) {
// Relevante befehle abrarbeiten:
switch(frame_in.cmd) {
// Auf eine Pinganfrage antworten:
case CMD_PING: {
if (frame_in.resp == 0) sendPingFrame(VERSION, TYPE);
break;
}
// Weitere Geräteinfos übertragen:
case CMD_CONFIG: {
if (frame_in.resp == 0 && compareUID(frame_in.data, mcan_uid) == 1) {
sendDeviceInfo(SERIAL_NUMBER, 0, 0,ITEM_NUMBER, DEVICE_NAME);
}
}
// Schaltbefehl abarbeiten:
case CMD_SWITCH_ACC: {
if (frame_in.resp == 0 && compareUID(frame_in.data, MM_ACC + ADDRESS - 1) == 1) {
// Do stuff
}
break;
}
default: break;
}
}
}
Das ist eigentlich schon alles, was CAN-spezifisch ist, abgesehen von den Config-Kanälen. Um weitere Arten von Befehlen abzuarbeiten muss lediglich ein weiterer Case mit entsprechendem Befehl hinzugefügt werden. Der Rest ist quasi Standard-Arduino-Praxis.
Getestet habe ich den Beispielcode auf einem ATmega2560, aber der sollte so auch "Out of the Box" auf einem ATmega328 laufen. Du kannst den Code ja einfach mal versuchsweise auf eines deiner Module aufspielen. Die aktuelle Lib findest du wie zuvor unter dem Link in meinem vorherigen Beitrag.
Ich werde dir später noch mal auf deine Mail antworten, um auf ein paar weitere Punkte einzugehen.
Viele Grüße und Clausthaler Glück Auf,
Maxi.
____________________________________________________
github.com/Ixam97
MäCAN Reborn
- Ixam97
- InterRegioExpress (IRE)
-
Beiträge: 255 Registriert am: 13.01.2014
RE: Elektronik für den Märklin CAN Bus
![]() #8 von
PatrikL
, 13.03.2021 20:26
#8 von
PatrikL
, 13.03.2021 20:26
Hallo Maxi,
Ich habe dein Testbeispiel auf meiner Hardware eingesetzt, es läuft sehr gut bis jetzt. Ich denke ich werde meinen Belegtmelder und den Weichendecoder auf die neue Libary umschreiben.
Ich habe deinen Beispielcode noch etwas angepasst, somit funktioniert das aus meiner Sicht wichtigste Feature, das automatische erstellen von UID und Seriennummer ohne Probleme und wird ebenfalls korrekt an die CS3 gemeldet.
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
#include "mcan.h"
#include <avr/boot.h> // Wird zum auslesen der Seriennummer benötigt
#define VERSION 0x0202 // Softwareversion (hier beispielhaft 2.1)
#define TYPE 0x70 // Gerätetyp
#define ITEM_NUMBER "#Artikel" // Artikelnummer, max. 8 Zeichen
#define DEVICE_NAME "MäCan Test" // Gerätename
#define BASE_UID 0x19000000 // Geräte-UID
#define ADDRESS 0x01 // Magnetartikeladresse
canFrame frame_in; // Eingehender CAN-Frame
uint16_t serial_nbr;
uint16_t can_uid;
void setup() {
serial_nbr = (uint16_t)(boot_signature_byte_get(22) << 8) | boot_signature_byte_get(23); // Seriennummer auslesen
can_uid = BASE_UID + serial_nbr;
mcan_init(BASE_UID + serial_nbr); // CAN-Bus mit UID initialisieren
}
void loop() {
// Überpüfen, ob CAN-Frame im Ringpuffer bereit steht:
if (readCanFrame(&frame_in) == 1) {
// Relevante befehle abrarbeiten:
switch(frame_in.cmd) {
// Auf eine Pinganfrage antworten:
case CMD_PING: {
if (frame_in.resp == 0) sendPingFrame(VERSION, TYPE);
break;
}
// Weitere Geräteinfos übertragen:
case CMD_CONFIG: {
if (frame_in.resp == 0 && compareUID(frame_in.data, mcan_uid) == 1) {
sendDeviceInfo(serial_nbr, 0, 0,ITEM_NUMBER, DEVICE_NAME);
}
}
// Schaltbefehl abarbeiten:
case CMD_SWITCH_ACC: {
if (frame_in.resp == 0 && compareUID(frame_in.data, MM_ACC + ADDRESS - 1) == 1) {
// Do stuff
}
break;
}
default: break;
}
}
}
Der CAN-Monitor liefert schonmal erste Details, jedes der drei Testmodule hat eine eigene UID und Seriennummer bekommen:
Auch die CS3 scheint zufrieden zu sein: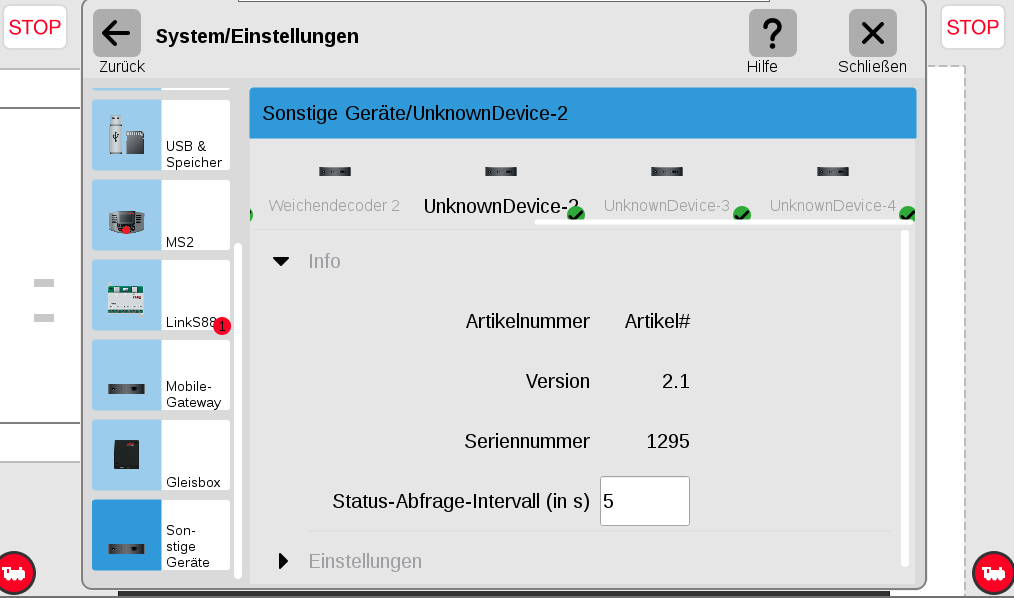
Jetzt bräuchte man nur noch Funktionen die sich um die Status LED sowie den EEPROM Zugriff kümmert, dann wäre das genial
Das sollte ich eigentlich mit meinen Kenntnissen noch hinkriegen, du hast das bei deinen Bausteinen ja alles im Hauptprogramm untergebracht.
Das Sahnehäubchen wäre dann natürlich ein Bootloader der Updates über den CAN Bus ermöglichen würde
Grüsse
Patrik
- PatrikL
- S-Bahn (S)
-
Beiträge: 19 Registriert am: 05.08.2019 Spurweite N
RE: Elektronik für den Märklin CAN Bus
![]() #9 von
mfx-driver
, 13.03.2021 22:35
#9 von
mfx-driver
, 13.03.2021 22:35
Hallo liebe Märklin CAN Spezialisten,
Ich habe mal eine Frage zum CAN Bus die ihr mir sicher beantworten könnt. Gibt es eine möglich den CAN Bus zu überprüfen? Oder funktioniert er immer einwandfrei wenn alle angeschlossenen Module erreichbar sind?
Gruß
Josef
- mfx-driver
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 31.12.2007 Ort: bei München Gleise C-Gleis Spurweite H0, 1 Steuerung CS3 Stromart Digital
RE: Elektronik für den Märklin CAN Bus
![]() #10 von
Ixam97
, 13.03.2021 23:21
#10 von
Ixam97
, 13.03.2021 23:21
Hallo Patrik,
freut mich, dass das so problemlos geklappt hat.
Die Ansteuerung der LEDs und anderer Funktionen, die nicht direkt mit dem Bus im Zusammenhang stehen, habe ich bewusst nicht in die Lib aufgenommen, um hier für alle möglichen Anwendungszwecke flexibel zu bleiben und keine unnötigen Sonderfälle in die Lib einzubauen.
Ein Hinweis noch zu dem Gerätenamen: Du darfst in dem String keine direkten Umlaute einfügen. Nach meinem Kenntnisstand kommen die CSen damit nicht zurecht. Da musst du die escape-sequence aus meinem Beispiel nehmen.
Ich werde Mal schauen, ob ich morgen Zeit finde, einen Bootloader für dich zu kompilieren. Dann kannst du den auch Mal ausprobieren.
Zitat
Ich habe mal eine Frage zum CAN Bus die ihr mir sicher beantworten könnt. Gibt es eine möglich den CAN Bus zu überprüfen? Oder funktioniert er immer einwandfrei wenn alle angeschlossenen Module erreichbar sind?
Hallo Josef,
was genau willst du denn überprüfen? Wenn alle Geräte ordnungsgemäß funktionieren besteht kein Anlass zur Annahme, dass da was nicht stimmt. Wenn du die modifizierte Gleisbox von Gerd benutzt kannst du mit dem Befehl "can-monitor" den Verkehr auf dem Bus beobachten, falls das dein Ziel ist.
Viele Grüße und Clausthaler Glück Auf,
Maxi.
____________________________________________________
github.com/Ixam97
MäCAN Reborn
- Ixam97
- InterRegioExpress (IRE)
-
Beiträge: 255 Registriert am: 13.01.2014
RE: Elektronik für den Märklin CAN Bus
![]() #11 von
bertr2d2
, 14.03.2021 10:15
#11 von
bertr2d2
, 14.03.2021 10:15
Hallo Josef,
Zitat
Hallo liebe Märklin CAN Spezialisten,
Ich habe mal eine Frage zum CAN Bus die ihr mir sicher beantworten könnt. Gibt es eine möglich den CAN Bus zu überprüfen? Oder funktioniert er immer einwandfrei wenn alle angeschlossenen Module erreichbar sind?
unter Linux besteht die Möglichkeit auf erweiterte Debugging Möglichkeiten zurück zu greifen. U.A. mit BananaPi und RasperryPi kann man mit candump Error Frames sich anzeigen lassen. Rainer war so nett und hat diese Funktion auch im can-monitor (Option -v) eingebaut.
Sofern also das Endgerät eingeschaltet ist und eine physikalische Verbindung zum CAN Bus hat, kann man damit auch, in einem gewissen Rahmen, Fehlerursachen schnell heraus finden.
Deshalb habe ich auch immer ein BananaPi am CAN-Bus hängen.
Gruß
Gerd
Smallest Rocrail Server Ever II ist jetzt Smallest Railroad Server Ever II
SRSEII -> SRSEII (Raider heisst jetzt Twix, sonst ändert sich nix )
- bertr2d2
- CityNightLine (CNL)
-
Beiträge: 1.539 Registriert am: 09.10.2012 Spurweite H0 Stromart Digital
RE: Elektronik für den Märklin CAN Bus
![]() #12 von
bertr2d2
, 14.03.2021 10:39
#12 von
bertr2d2
, 14.03.2021 10:39
Hallo Patrik,
Zitat
Der CAN-Monitor liefert schonmal erste Details, jedes der drei Testmodule hat eine eigene UID und Seriennummer bekommen:
wenn Du mir die UIDs und Gerätekennung Deiner Komponenten erläutern kannst, kann ich das im can-monitor einbauen. Dann erscheint der Komponentenname in der Ausgabe anstatt 'unbekannt'.
Gruß
Gerd
Smallest Rocrail Server Ever II ist jetzt Smallest Railroad Server Ever II
SRSEII -> SRSEII (Raider heisst jetzt Twix, sonst ändert sich nix )
- bertr2d2
- CityNightLine (CNL)
-
Beiträge: 1.539 Registriert am: 09.10.2012 Spurweite H0 Stromart Digital
RE: Elektronik für den Märklin CAN Bus
![]() #13 von
mfx-driver
, 14.03.2021 11:29
#13 von
mfx-driver
, 14.03.2021 11:29
Hallo zusammen,
anbei mal meine CAN-Bus Übersicht: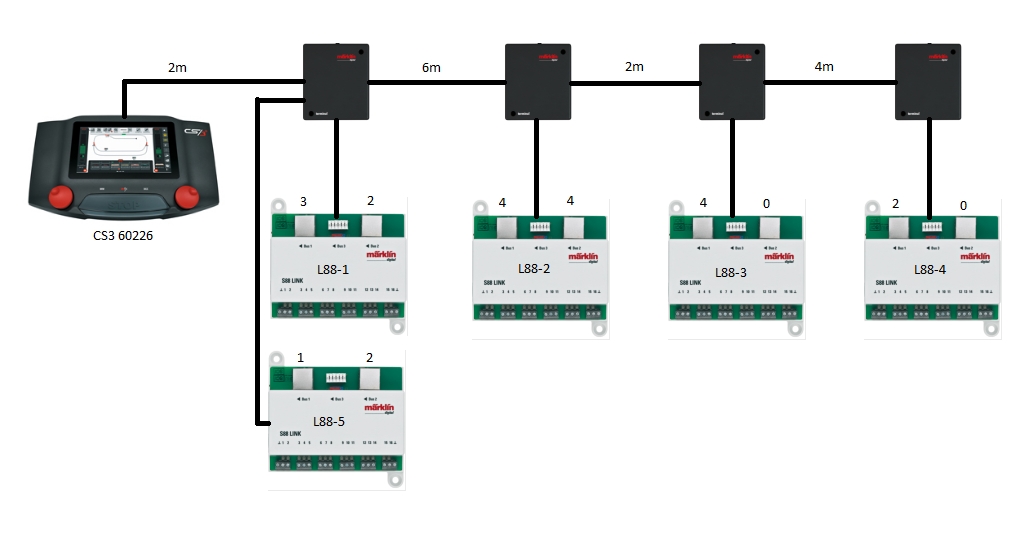
Ich habe 5 L88 Module verbaut. An diesen Modulen sind dann noch S88 AC Module angeschlossen.
Die L88 Module funktionieren einwandfrei, aber manchmal gibt es auf einzelnen Kontakten der S88 AC Module Störimpulse.
D.h. die Kontakte sind eigentlich frei, aber es kommt zu Meldungen. Die Störimpulse kommen auch wenn an den Betroffenen S88 AC Modulen keine Rückmeldeleitungen angeschlossen sind. Mit 100ms Zykluszeit und 167µs Bitzeit gibt es relativ viele Fehlimpulse, wenn ich der Bitzeit höher setze wird es besser. Ich möchte jetzt einfach ausschließen das es am CAN Bus liegen kann. Mein Bus ist ja relativ lang. Bei der Inbetriebnahme haben die L88 Module in Verbindung mit den Verlängerungskabeln auch nicht gleich funktioniert. Ich habe auch schon von Fällen gelesen bei denen z.B. ein Terminal defekt war und Störungen am CAN Bus verursacht hat...
gruß
Josef
- mfx-driver
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 31.12.2007 Ort: bei München Gleise C-Gleis Spurweite H0, 1 Steuerung CS3 Stromart Digital
RE: Elektronik für den Märklin CAN Bus
![]() #14 von
bertr2d2
, 14.03.2021 12:18
#14 von
bertr2d2
, 14.03.2021 12:18
Hallo Josef,
das Thema hat nichts mit dem ursprünglichen Thema zu tun. Bitte mache ein separaten Thread auf.
Und kontaktiere den Märklin Support.
Gruß
Gerd
Smallest Rocrail Server Ever II ist jetzt Smallest Railroad Server Ever II
SRSEII -> SRSEII (Raider heisst jetzt Twix, sonst ändert sich nix )
- bertr2d2
- CityNightLine (CNL)
-
Beiträge: 1.539 Registriert am: 09.10.2012 Spurweite H0 Stromart Digital
RE: Elektronik für den Märklin CAN Bus
![]() #15 von
mfx-driver
, 14.03.2021 14:05
#15 von
mfx-driver
, 14.03.2021 14:05
Hallo Gerd,
mit dem separaten Thread hatte ich leider keinen Erfolg.
viewtopic.php?f=5&t=180466
Ich werde mal bei Märklin anfragen.
gruß
Josef
- mfx-driver
- InterRegioExpress (IRE)
-
Beiträge: 294 Registriert am: 31.12.2007 Ort: bei München Gleise C-Gleis Spurweite H0, 1 Steuerung CS3 Stromart Digital
RE: Elektronik für den Märklin CAN Bus
![]() #16 von
else666
, 09.08.2023 11:03
#16 von
else666
, 09.08.2023 11:03
Hallo Patrik,
finde ich super, was du da auf die Beine gestellt hast. Ich wärm den Thread mal auf, vielleicht ist das ja noch aktuell. Die Platinen hab ich mal bei GitHub runter geladen, jetzt wüßte ich gern noch welchen Typ Gehäuse hast du verwendet? Spontan würde ich auf Typ 528 tippen.
Gibt ja bestimmt auch Software dafür? Zum Probieren würde ich mir gern mal dein rudimentäres Werk drauf spielen, später kann ich das dann meinen Bedürfnissen anpassen.
Hab dir auch eine PN geschickt, falls du das hier nicht siehst...
Du sagtest, du hättest auch Reichelt Warenkörbe? Das wär natürlich auch super. Notfalls krieg ich das auch allein hin...
Viele Grüße
Ralf
Viele Grüße
Ralf
- else666
- S-Bahn (S)
-
Beiträge: 18 Registriert am: 01.07.2020 Ort: Flensburg Gleise Märklin K-Gleis Spurweite H0, H0e Steuerung Mischung aus Banana Pi, Tams Master und diversen Eigenbauten Stromart AC, Digital, Analog
RE: Elektronik für den Märklin CAN Bus
![]() #17 von
achim1152
, 15.02.2024 18:03
#17 von
achim1152
, 15.02.2024 18:03
Hallo Patrik,
ich bin Gartenbahner auf großer Spur (Link zu dampfgartenbahn.de) und möchte die Gartenbahn mit überschaubaren Hardwareaufwand sicher und über große Entfernungen (bis 500 Meter) steuern. Deshalb bin ich zum CAN-Bus und darüber auf Deine interessanten Aktivitäten gekommen.
Ich will von einer Zentrale (PC, vielleicht mit rocrail) über eine Schnittstellenbaugruppe auf den Bus kommen. Am Bus brauche ich Sensormodule (Gleiskontakte) und Schaltmodule (Signale, Weichen).
Was Du beschreibst scheint meinen Erfordernissen sehr nahe zu kommen. Stimmt das? Wärst Du bereit Dein Wissen mir mir zu teilen? Ich habe viel Erfahrung mit Hardware, aber nur wenig mit der speziellen Software und würde aber gern selber bauen.
Ich würde mich freuen etwas positives von Dir zu hören.
Joachim
- achim1152
-
Beiträge: 5 Registriert am: 17.05.2020
-
- Ähnliche Themen
- Antworten
- Zugriffe
- Letzter Beitrag
-
- Elektronik-Anfänger
Erstellt im Forum Elektrik und Elektronik von Albert-Hessen - 4
- 885
- Letzter Beitrag von
Albert-Hessen

22.05.2023
- Elektronik-Anfänger
-
- Elektronik Herkat 2657 - Zu verschenken
Erstellt im Forum Elektrik und Elektronik von HansK2 - 1
- 647
- Letzter Beitrag von
HansK2
08.02.2023
- Elektronik Herkat 2657 - Zu verschenken
-
- Modellbahn-Elektronik Herkat 2656 - Zu verschenken
Erstellt im Forum Elektrik und Elektronik von HansK2 - 1
- 730
- Letzter Beitrag von
HansK2
08.02.2023
- Modellbahn-Elektronik Herkat 2656 - Zu verschenken
-
- Erfahrung mit den Produkten der Fa. mktw-Elektronik
Erstellt im Forum Digital von MartinW - 1
- 639
- Letzter Beitrag von
KWer
12.12.2022
- Erfahrung mit den Produkten der Fa. mktw-Elektronik
-
- Elektronik Beginner sucht Hilfe
Erstellt im Forum Elektrik und Elektronik von Quox - 6
- 1111
- Letzter Beitrag von
Instandsetzung
02.09.2022
- Elektronik Beginner sucht Hilfe
-
- Löten+Elektronik lernen, Ausrüstungskoffer mit Lötstation, Multimeter, Stromquelle aufbauen
Erstellt im Forum Werkzeuge und Hilfsmittel für die MoBa von KLVM - 42
- 4364
- Letzter Beitrag von
md95129
18.06.2022
- Löten+Elektronik lernen, Ausrüstungskoffer mit Lötstation, Multimeter, Stromquelle aufbauen
-
- HEKI Elektronik-Module
Erstellt im Forum Elektrik und Elektronik von - 1
- 1736
- Letzter Beitrag von
B12
15.09.2008
- HEKI Elektronik-Module
-
- Welche Elektronik ist das ?
Erstellt im Forum Elektrik und Elektronik von - 3
- 1602
- Letzter Beitrag von
rgroll
11.04.2008
- Welche Elektronik ist das ?
-
- Schaltplan 6600-Elektronik
Erstellt im Forum Elektrik und Elektronik von - 17
- 10323
- Letzter Beitrag von
alexus
10.04.2024
- Schaltplan 6600-Elektronik
