Hallo Maxi,
Zitat von Ixam97
Zitat von st-oldie
Eigentlich ergibt sich daraus eine andere Frage. Kann ich deine Module aus dem Antwort des Ping eindeutig identifizieren? Also von anderen Decodern mit anderen Featues unterscheiden? Ich wollte im ersten Schitt vermeiden, eine Webseite speziell zu einer gefundenen UID zu erstellen. Das läßt sich auch machen, sollte aber höchstens als zukünftige Erweiterung irgendwann später mal auf der Tagesordnung stehen.
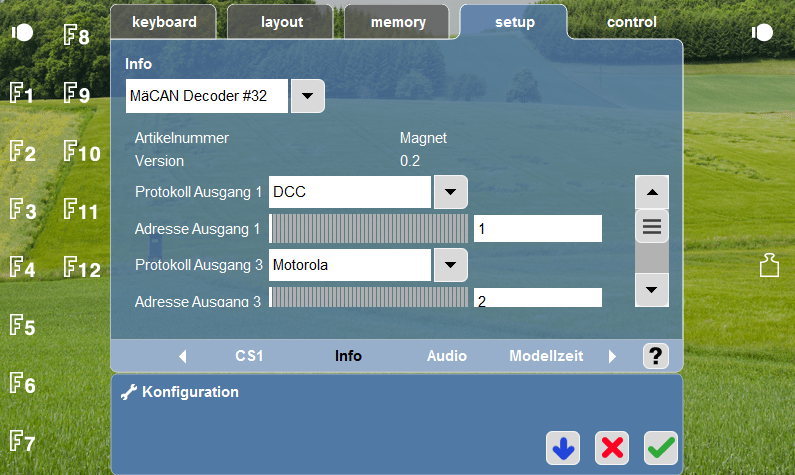
Ich zitiere mal aus der M*rklin-Doku: "Geräte-UID: Eindeutig vergebene Universal ID". Die UID ist also eindeutig und einmalig vergeben. Jeder Teilnehmer auf dem CAN kann dadurch eindeutig identifiziert und adressiert werden. Bei meinen Modulen wird die UID beim Aufspielen der Software festgelegt und kann auch nur beim erneuten Aufspielen der Software verändert werden. Ebenso die Nummer, die in der CS2 angezeigt wird (also "MäCAN-Decoder #1" etc.)
Ja, das ist klar das die UID das Gerät eindeutig identifiziert. Aber das war eigentlich nicht meine Frage. Wenn ein Gerät auf meinen Ping antwortet, woran erkenne ich deine Module? Eine Antwort auf einen Ping beinhaltet ja die Gerätekennung. Damit könntest du deine Geräte auch identifizieren.
Zitat von Ixam97
Das sinnvollste wäre vermutlich, wenn deine Software das selbe machten würde, wie die CS2. Dann müsstest du auch nicht für jedes Modul einzeln eine Seite erstellen, sondern diese würden dynamisch erzeugt. Meine Module übertragen ja alles, was dafür notwendig ist. Das wäre am Anfang zwar ein erheblicher Mehraufwand, dafür müsste das ganze nur ein mal gemacht werden und deine Software würde mit allen zukünftigen Modulen und Softwareversionen, die ich noch so in Planung habe, funktionieren, ohne, dass du etwas anpassen müsstest. Genauso würde dann direkt Gerds CANBuster damit laufen, sofern dieser die Konfiguration über die CS2 weiter verfolgt, sowie der Link S88.
Wahrscheinlich dürfte das dann wirklich das beste sein. Ich wollte eigentlich im ersten Schritt genau das vermeiden, da es für den Anfang den größten Aufwand ist. Ich hatte gehofft, im ersten Schritt eine Konfigurationsseite statisch zu erzeugen. Und dann das irgendwann später auszubauen.
Zitat von Ixam97
Würde die Software denn dann auch parallel zu Gerds can2lan, ms2wifi etc funktionieren?
Meine Software ersetzt can2lan, ms2wifi, ... Ich hatte vor 3-4 Jahren mit meinem BBB angefangen. Und dann auch mit einer "einfachen" Schleife genau wie can2lan angefangen, die CAN und Ethernet abfragt und auf das andere Interface weiterleitet. Und dann hab ich mich als Software Ingenieur etwas "ausgetobt" und das ganze umstrukturiert. Ich hab als zentralen Kern die drehscheibe, die die Daten zwischen den clients weiterletet. Und dann für jede Schnittstelle bzw. Protokoll einen Client, der sich mit der drehscheibe über sockets verbindet. Dadiurch läßt sich meine Software leicht an andere Schnittstlellen oder Protokolle anpassen. Die Logik z.B. zur Verwaltung der cs2 Dateien steckt im client_zentrale. Meine Software integriet alles. Zusätzlich hab ich eine Webconig, mit der ich die Konfiguratiosndatei meiner Software anpassen kann. Das dazugehörige PHP Script hat mein kollege, der sich das mal anschauen wollte, beigesteuert. Auch ein Mechanismus für Updates ist schon vorgesehen.
Man könnte meine Software auch als Weiterentwicklung von can2lan sehen. Gerd hat auch meine Entwicklung seit 3.4 Jahren mitverfolgt. Leider ist Gerd bei seinem can2lan geblieben, obwohl er seit 3-4 Jahren meine Arbeit kennt. Ich denke nämlich, daß meine Software durch die Umstrukturierung und der bisher vorhandenen Features mehr Potential hat. Und die Software läßt sich auf diversen System zum Laufen bringen, wenn die System unter Linux laufen. Eine Anpassung an verschiedene Busse dürfte immer recht einfach sein.
Ich versuche, meine Software so langsam weiter zu entwickeln, So, wie es gerade paßt. Aber auch, wie ich es brauche. Mein Ziel war es, im Gegensatz zu can2lan auch ohne einen Computer zu spielen. Damit gibt es einen Betriebsmodus, in dem ich die Lokliste von der MS2 abhole. Als "Abfallprodukt" gibt es aber einen Betriebsmodus, in dem meine Software als Proxy arbeitet, so wie es can2lan tut. Wenn ich die Grenze der 40 Loks der MS2 erreicht habe, muß ich wohl eine Modus in meine Software integrieren, in der meine Software auch die Anmeldung der Loks bearbeitet. Damit wäre meine Software eine CS2 ohen GUI. Die dazugehörige Webconfig wäre dann die Möglichkeit, meine Software zu konfigurieren.
Die konfiguration externer Module wäre damit eine logische Erweiterung.
Tschüß
Michael


 )
)
 .
.




 . Und ich bezweifle stark, dass da irgendein System Probleme mit haben wird. Die Anzeige in der CS2 ist die einzige Stelle, an der das "ä" auftaucht. Und da wird das auch alles mit ASCII übertragen, sodass es da zu keinen Problemen kommen dürfte. Intern wird allenfalls "M_CAN", "MCAN" oder "MaeCAN" benutz.
. Und ich bezweifle stark, dass da irgendein System Probleme mit haben wird. Die Anzeige in der CS2 ist die einzige Stelle, an der das "ä" auftaucht. Und da wird das auch alles mit ASCII übertragen, sodass es da zu keinen Problemen kommen dürfte. Intern wird allenfalls "M_CAN", "MCAN" oder "MaeCAN" benutz.  ops:
ops: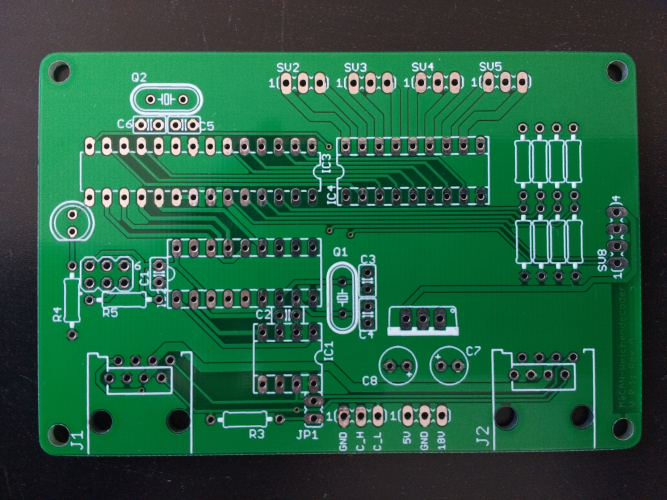


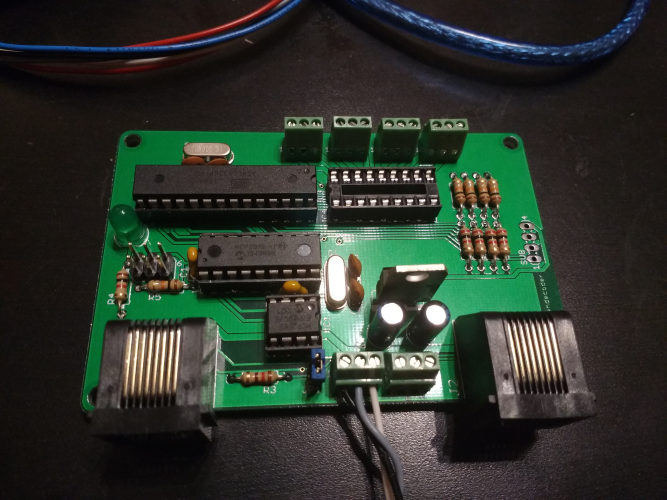


 Das "MäCAN-Projekt" wird bald eine weiteres Mitglied haben
Das "MäCAN-Projekt" wird bald eine weiteres Mitglied haben 
