Hallo,
nach erfolgreichen Tests durch einige User wollte ich euch für Ostern etwas neues zum Spielen zur Verfügung stellen. Die aktuelle Version als Sourcecode und Images für BBB und BPi gibt es wie üblich über meine Homepage.
Ich hab den Fehler beim Schreiben der Lokfunktionen in der lokomotive.cs2 behoben. Das ist wohl die wichtigste Änderung.
Dann hab ich die Webconfig überarbeitet. Es können jetzt die Messwerte und Konfigurationswerte der CAN Geräte angezeigt und editiert werden. Für die Konfiguration des Linux Systems ist das "webmin" Paket integriert. Die Webkonfig ist vorbereitet, auch Update Files einzuspielen.
Wenn der Minicomputer seine IP Adresse per DHCP bekommt, stellt sich ja die Frage, wie man die IP Adresse ermitteln kann. Dazu ist ein upnp Server integriert. Unter Windows kann man im Explorer unter "Netzwerk" alle upnp Geräte sehen:
Ein Klick mit der rechten Maustaste öffnet ein Menü, über das ein Webbrowser mit der URL des Systems gestartet werden kann:
Der Startbildschirm im Webbrowser ist der folgende: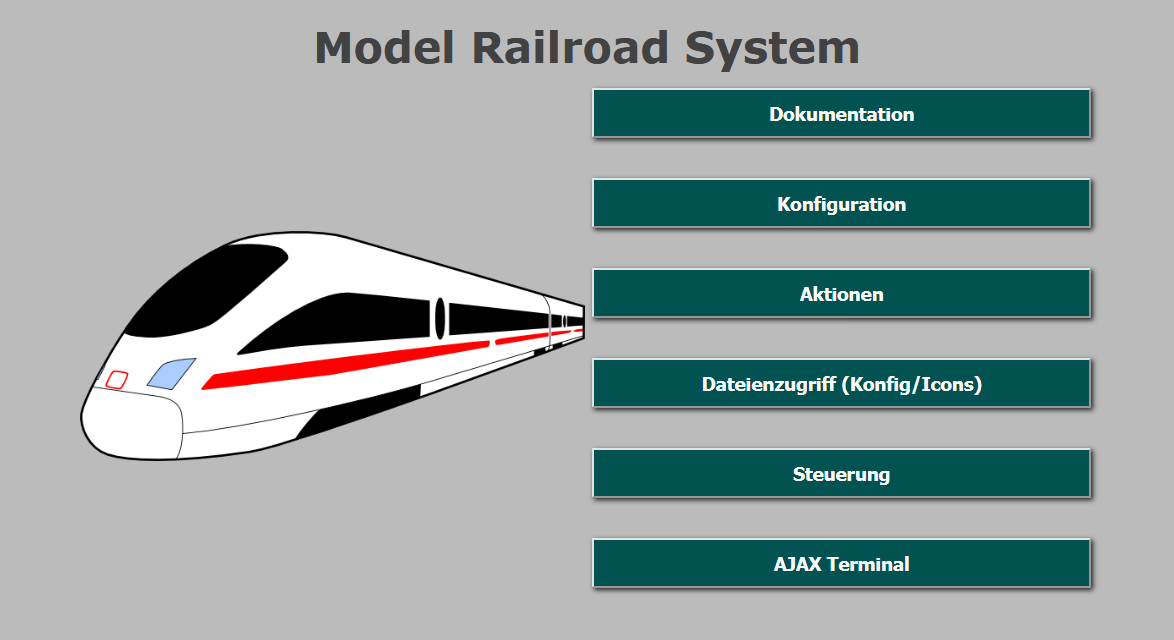
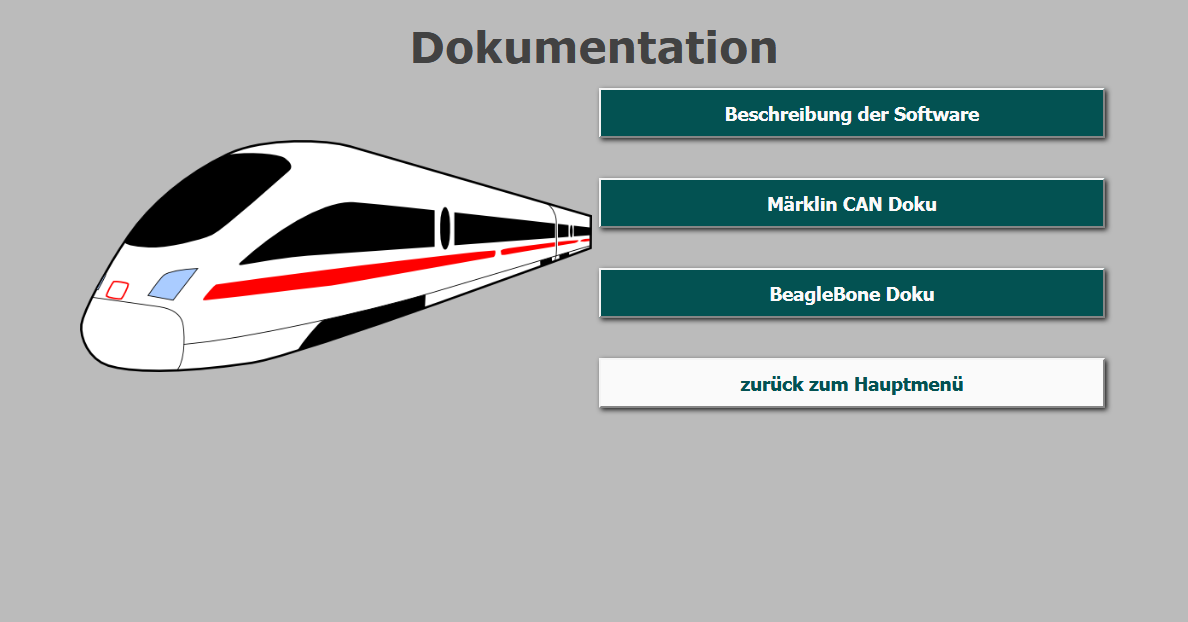
- Unter dem Menüpunkt "Dokumentation" ist die Dokumentation des Quellcodes zu finden:
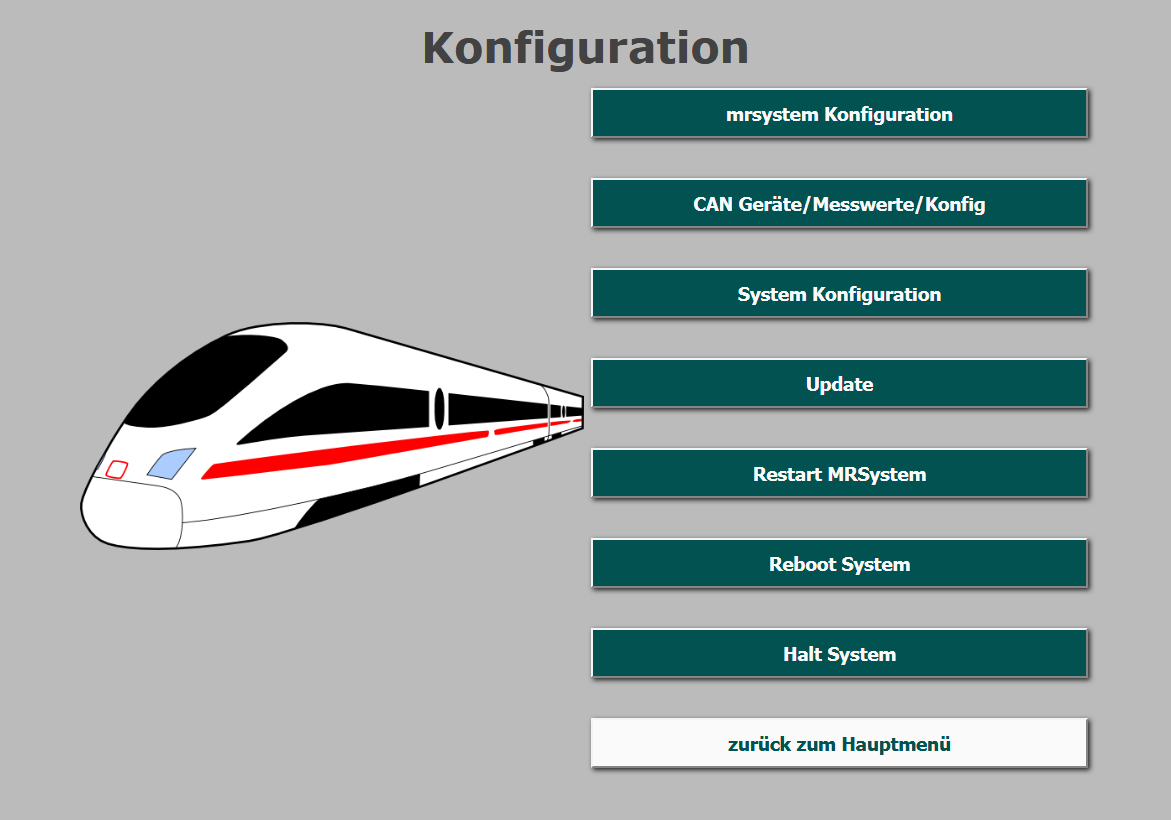
- Unter dem Menüpunkt "Konfiguration" finden sich Menüpunkte, um das mrsystem oder auch das Linux System
zu konfigurieren:
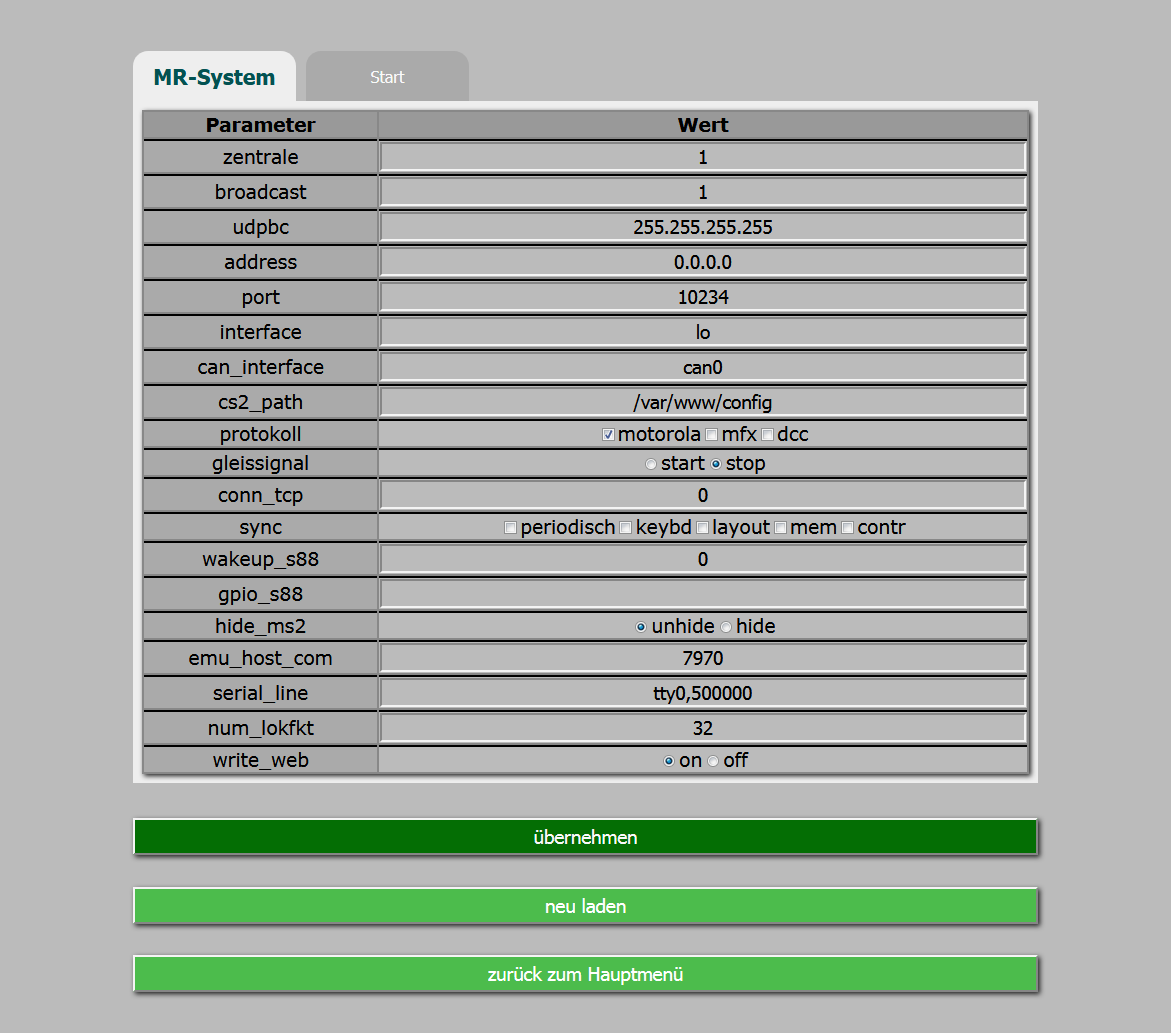
[list] - Unter dem Menüpunkt "mrsystem Konfiguration" befindet sich die Konfigiuration des mrsystem. Der erste Tab dient dem Editiern der Konfigdatei "/etc/mrsystem":
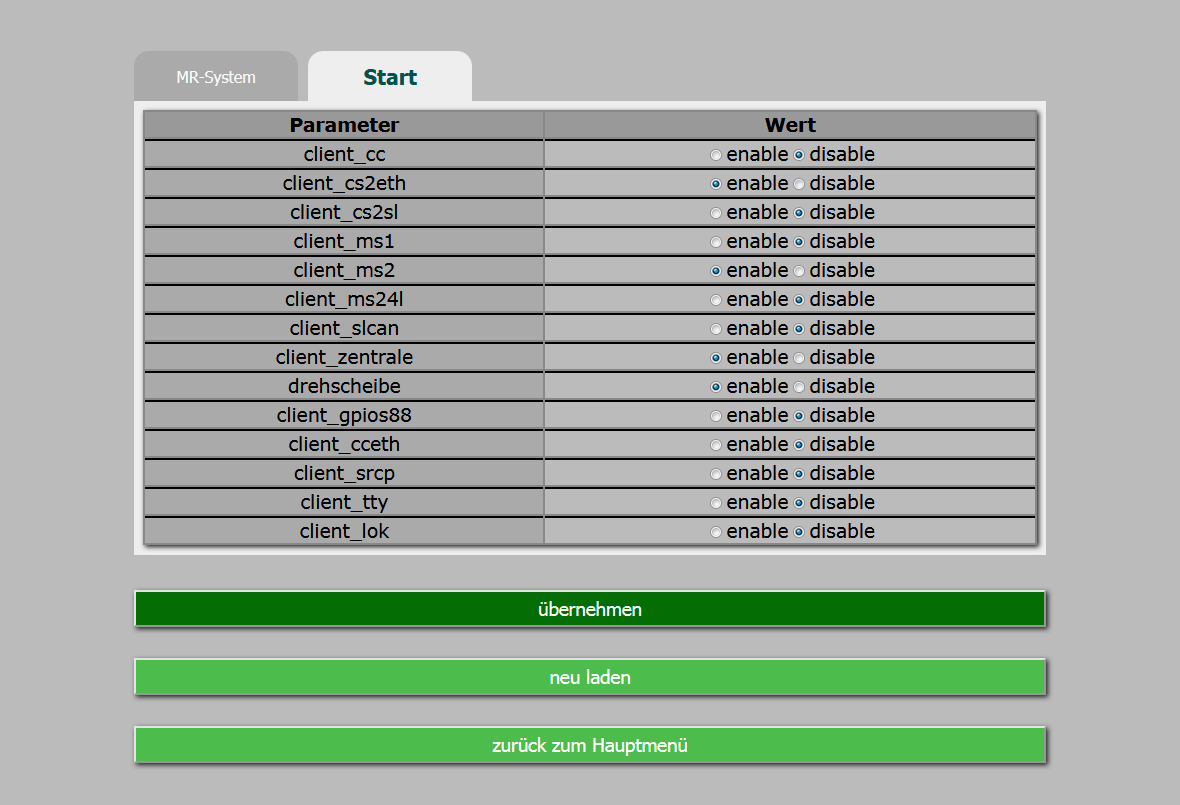
Der zweite Tab dient dem Editiern der Konfigdatei "/etc/mrstart" für die zu startenden Daemons:
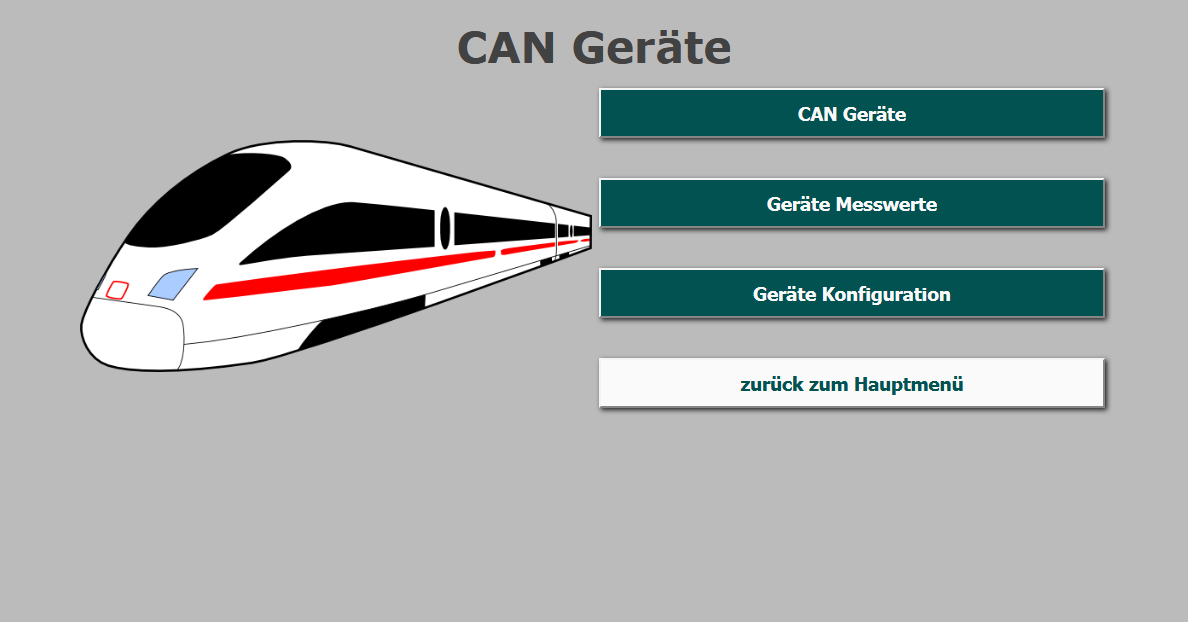
- Unter dem Menüpunkt "CAN Geräte/Messwerte/Konfiguration" werden die Geräte am CAN Bus mit ihren Messwwerten und Konfigwerten angezeigt:
[list] - Unter dem Menüpunkt "CAN Geräte" werden die Geräte am CAN Bus aufgeführt.
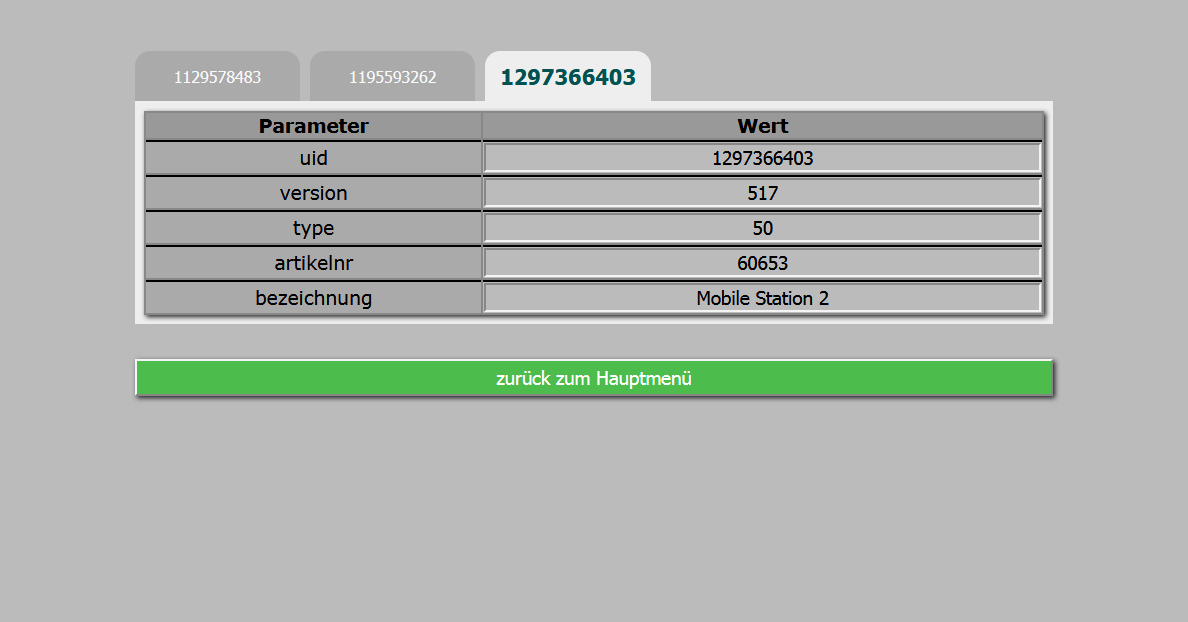
Dieser Tab zeigt als Beispiel ein MS2 am CAN Bus:
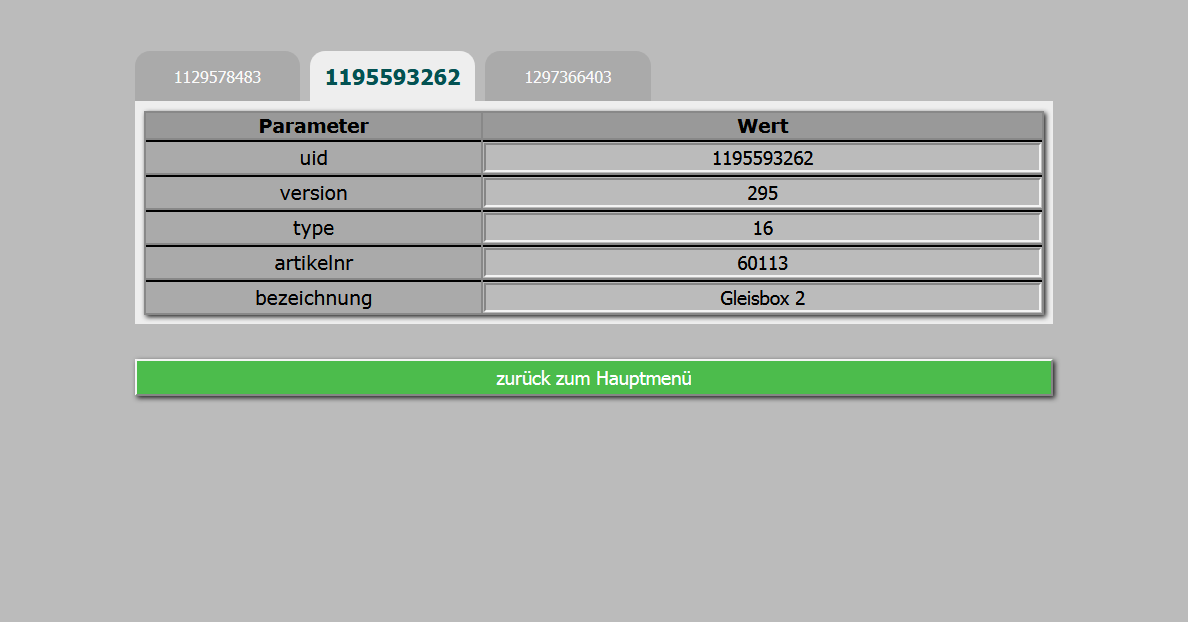
Dieser Tab zeigt als Beispiel die Gleisbox am CAN Bus:
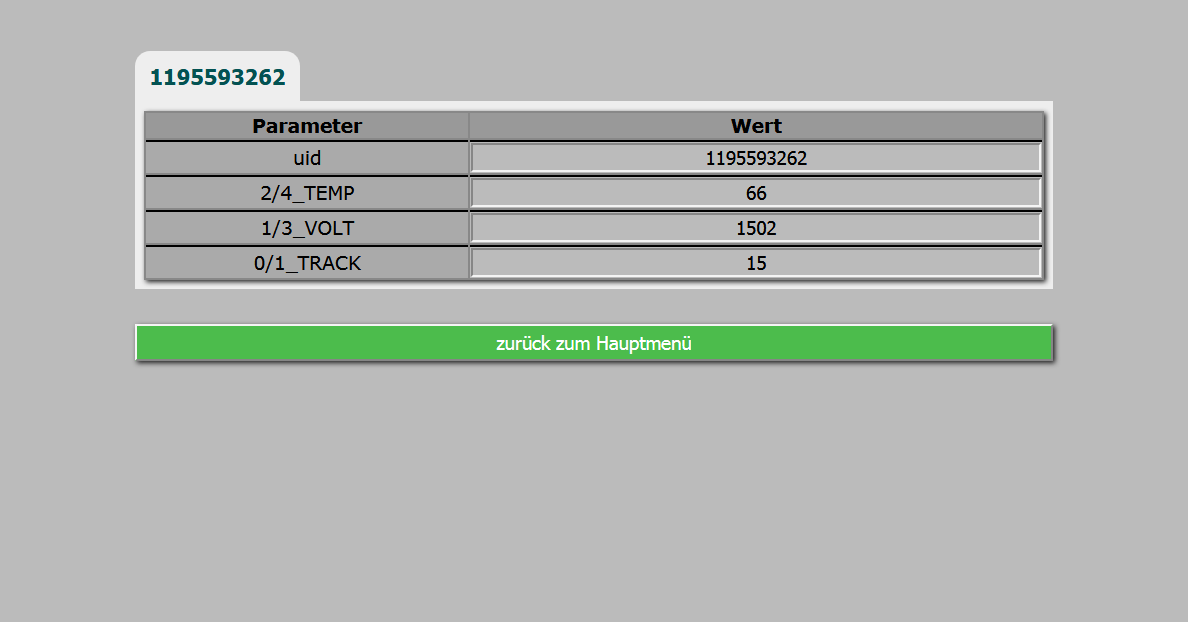
- Unter dem Menüpunkt "Geräte Messwerte" werden die Messwerte der Geräte am CAN Bus aufgeführt. Dieser Tab zeigt als Beispiel die Messwerte der Gleisbox:
- Unter dem Menüpunkt "Geräte Konfiguration" werden die Konfigurationswerte der Geräte am CAN Bus aufgeführt und können verändert werden.
[*]System Konfiguration
Dieser Menüpunkt führt zu den Konfiguratiuonsseiten des webmin Pakets, mit denen das Linux System konfiguriert werden kann. Die Systemkonfiguration erfolgt über das webmin Paket.
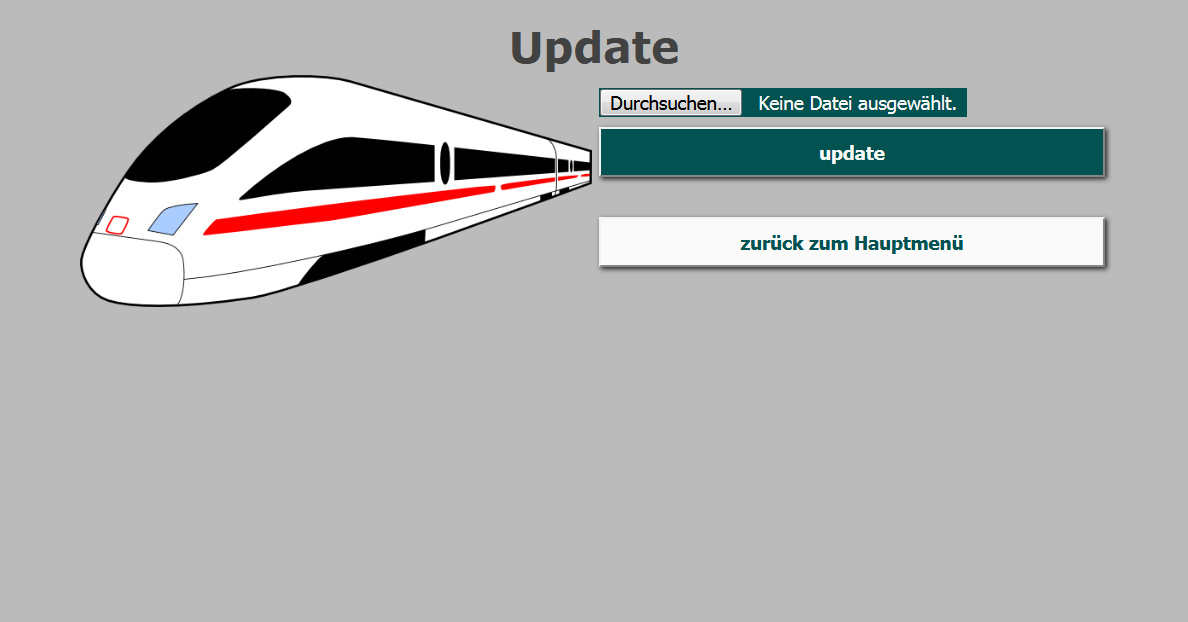
[*]Unter dem Menüpunkt "Update" können Update Files eingespielt werden:
[*]Mit dem Menüpunkt "Restart MRSystem" wird die mrsystem Software neu gestartet, was z.B. nach einer Änderung der Konfiguration nötig ist.
[*]Mit dem Menüpunkt "Reboot System" wird die das Gerät neu gestartet.
[*]Mit dem Menüpunkt "Halt System" wird die das Gerät sauber runtergefahren und angehalten.
[/list]
[*]Unter dem Menüpunkt "Dateizugriff" kann direkt auch dei *.cs2 Dateien und die Icons zugegriffen werden:
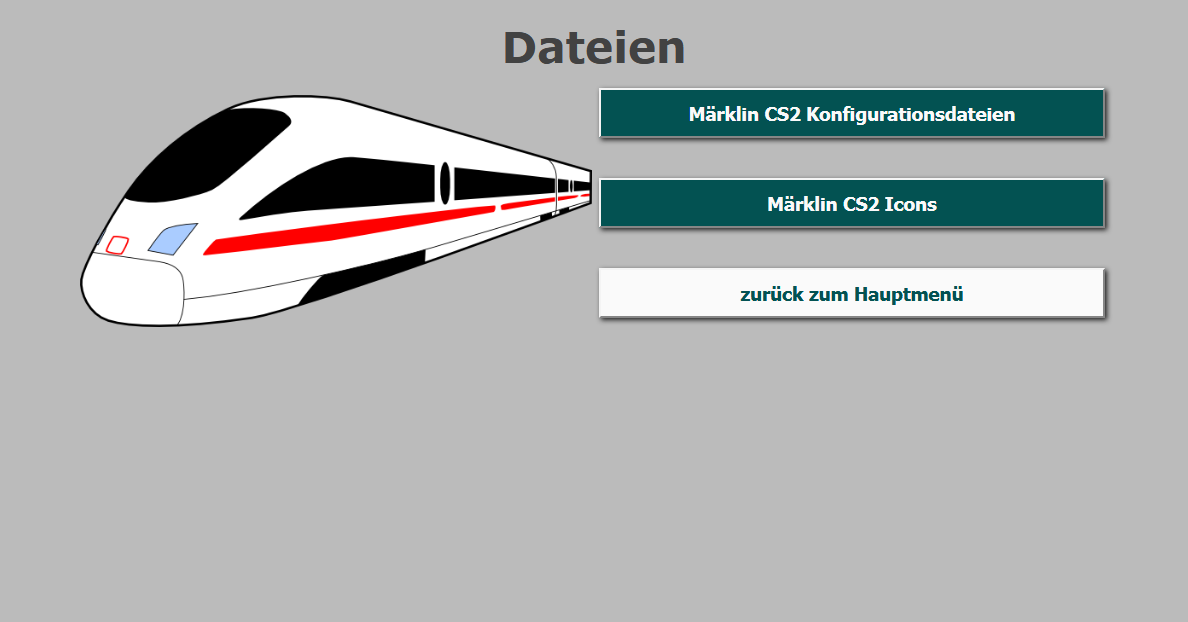
- Unter dem Menüpunkt "Märklin CS2 Konfigurationsdateien" kann auf die *.cs2 Datein zugegriffen werden:
- Unter dem Menüpunkt "Märklin CS2 Icons" kann auf die Lokicons Datein zugegriffen werden:
[*]Unter dem menüpunkt "Steuerpulte" findet man den MaeCAN Fahrregler:

[/list]
Tschüß
Michael